Milleks kasutatakse kõrgepinge induktsioonpooli? Spinningurull haugipüügiks. Inertsiaalne, inertsiaalne või kordaja
Inertsiaalset mähist käsitlevas artiklis on materjal esitatud järgmises järjekorras:
- mähise tööpõhimõte,
- hõõrdpidur,
- õngenööri poolile panemine,
- pooliprofiilide tüübid,
- pöörleva rulli suurus,
- rootori pöörlemiskiirus,
- rulli käepide,
- video rulli valimise kohta,
- laul ja nali kalapüügist.
Toimimispõhimõte
Spinningurull (edaspidi BC või lihtsalt rull) on laialdaselt kasutusel erinevates kalapüügiliikides ning tänapäeval peetakse seda kõige levinumaks ja universaalsemaks kogu kalastusmaailmas. Mõnes inglise keelt kõnelevas riigis nimetatakse seda "fikseeritud poolirulliks" - fikseeritud poolirull. Selle nime põhjuseks oli asjaolu, et töökorras BC pool jääb liikumatuks - fikseerituks.
Öeldu kinnituseks tuleb märkida, et sööda heitmisel lendab õngenöör paigalseisvalt poolilt maha ja rulli edasisel töötamisel: sööda kättesaamisel, kala lossimisel jne jääb see samuti pöörlemisest piiratuks.
Nöör on keritud nöörikihiga, mis pöörleb ümber pooli ühes tasapinnas.
Tänu pooli edasi-tagasi liikumisele, liikudes pöörleva virnastaja all edasi-tagasi, keritakse nöör mitte ühes kohas, vaid kogu trumli pikkuses.
- Hõõrdpiduri juhtnupp.
- Liini rull.
- Joonetugi.
- Pool.
- Rootor.
- Raam.
- Tagurpidi stopper.
- Käepide.
Nöörijuhik on rulli rootorile voltimismehhanismi kaudu monteeritud seade, mis koosneb õngenööri juhtklambrist ja juhtrullist, mis tagab õngenööri kerimise rulli poolile.
Rulli rootorit koos liinijuhikuga juhib käepideme pöörlemine teatud ülekandearvuga.
Ümber fikseeritud pooli pöörlev nöörijuhik kerib läbi juhtrulli venitatud õngenööri poolile, mis teeb edasi-tagasi edasi-tagasi liikumist.
Laagriga (soovitavalt) nöörijuhtrull tagab nööri ühtlase ja pehme libisemise ning voltimismehhanism võimaldab vajadusel nööri käepideme kronsteini avada ja sulgeda.
Selline konstruktiivne lahendus "pooli kinnitamiseks" päästis BC paljudest selle eelkäija puudustest - . Peamiseks peeti inertsimomenti, mille põhjustas pooli (trumli) pöörlev liikumine õngenööriga ja mis oli selle sagedase meelevaldse laskumise (“habe”) põhjuseks. Selle lahenduse elluviimiseks tuli BC prototüübiks olnud kordistirulli pooli pöörata 90 kraadi, muutes samal ajal oluliselt selle ajami disaini.
Hõõrdpidur
Keerutavad rullid tinglikult jagatud eesmiste ja tagumiste hõõrdpiduritega rullideks. Hõõrdepidur muudab pidurdusjõudu kasutades jõu suurust, mis on vajalik õngenööri poolilt tõmbamiseks, pehmendades sellega tõmblusi ja lööke suurte kalade haakimisel ja lossimisel. Samuti kindlustab see rulli mehhanismi ülekoormuse eest, kaitstes ridva purunemise eest kriitilise koormuse korral ja õngenööri purunemise eest.
Hõõrdpiduri asukoht ei mõjuta BC funktsioone, välja arvatud see, et esipiduriga kaalub rull vähem ja on sujuvamalt reguleeritav ning tagumise piduriga saab pooli kiiremini ja lihtsamalt eemaldada. 
Tagapiduriga rullil (foto 2) on piduriregulaatori käepideme asemel pooli lukustusnupp, millele vajutades saab selle lihtsalt eemaldada.
Esipiduri puhul on pooli eemaldamiseks vaja sidur täielikult lahti keerata ja selle reguleerimisnupp eemaldada.
Rulli pool ei ole alati paigal; selle pöörlemine on võimalik, kui tekib jõud, mis tõmbab õngenööri sellest välja. Sel juhul on sellel võime pöörata vastupidises suunas. Hõõrdepidur hoiab pooli kinni, blokeerides sellise pöörlemise, ja nööri tõmbejõud sõltub sellest, kui tihedalt see on pingutatud.
Mõnel ülimoodsal rullil on süsteem, mis võimaldab isegi täispiduri korral vabastada nööri maksimaalse lubatud koormusega. See kaitseb BC-d, kui seda kasutatakse valesti, ülekoormuste ja kahjustuste eest.
Hõõrdpiduri reguleerimisel seadke pidurdusjõud nii, et see oleks kolmandiku võrra väiksem kasutatava õngenööri tugevusest. Kui kasutatakse 6,0 kg raskust nööri, reguleeritakse hõõrdepidur jõuga, millega see nööri vabastab - 4,0 kg. Kui seda reeglit järgitakse, on BC ja varras vähem stressi all, mis võimaldab nende kasutusiga pikendada.
Nöör poolile
Nöör asetatakse BC-sse ümber pooli pöörleva nöörikihi ja pooli etteandemehhanismi, mis muudab käepideme pöörleva liikumise pooli edasi-tagasi liikumiseks.
Pooli liikumise täistsükkel "edasi - tagasi" vastab käepideme kahele pöördele, mille puhul tsükli esimesel poolel (“edasi”) asetatakse joon spiraalina ühes suunas ja teises (“tagasi”) - järgmine spiraali kiht asetatakse risti esimese peale, vastupidises suunas. Pöörlevates rullides kasutatakse kõige sagedamini kahte tüüpi pooli etteandemehhanisme. See on mehhanism koos uss või väntülekandmine:
1. tigukäik helistas "lõputu kruvi"- ussipaari kinemaatiline täpsus aitab kaasa pooli ühtlasemale etteandmisele, suurendades seeläbi nööri kerimise kvaliteeti.
2. vänt - ühendusvarda ülekanne kasutades lava taga helistas "vedur"- mõned mehhanismi omadused ei võimalda alati saavutada soovitud liini paigaldamise kvaliteeti.
Nöörikihi pöörlev liikumine ja pooli edasi-tagasi liikumine on omavahel kooskõlastatud rullimehhanismi abil. Kokkuleppe ühik on pooli etteande samm- selle liikumise pikkus rootori ühe täispöörde (pöörde) ajal, mida sageli nimetatakse "liini paigaldamise sammuks". Paigaldussamm mõjutab mähisekihi külgnevate pöörete vahelist kaugust ning seega ka selle tihedust ja kuju.
Ettenihke samm, mis on konstantne kogu "edasi-tagasi" tsükli jooksul, tagab õngenööri sirge silindrilise asetamise. Kõrguse muutmine etteandetsükli ajal võimaldab teil saada sirgjoonest erineva joone mähise kuju (joonise).
Joonisel on kujutatud kolme tüüpi kujundeid õngenööri paigaldamiseks silindrilisele poolile:
- standardne silindriline, tuntud ka kui sirge paigaldamine,
- sirge koonusega laotamine,
- tagurpidi koonuse ladumine.

-sirge (silindriline)- sellel on pidev lamatiste samm,võimaldab teil saada sirge mähise profiil (kuju), mis ei välista õngenööri spontaanset eemaldamist , asjaolu, mis ei takista seda tüüpi paigaldusega rulli pidada kõige levinumaks ja universaalsemaks, millega Erinevate poolikonfiguratsioonide abil saate saavutada kõiki kolme tüüpi mähise kuju.Ärge ajage segi pooli konfiguratsiooni nööri paigaldamise tüübiga; ühel juhul pooli geomeetriline kuju, teisel juhul paigaldatava nööri kuju.õngenöör sellel.
- sirge koonusega ladumine- on pooli külje poole suureneva munemisastmega, võimaldab saada koonusjoonega mähisprofiil. Tagab pikima heite, suurendades samal ajal nööri iseenesliku lahtituleku tõenäosust.
- lamamine tagurpidi koonus- selle samm väheneb külje poole,võimaldab teil saada tagurpidi koonusjoone mähisprofiil . See välistab täielikult spontaanse õngekao, kuid samal ajal väheneb sööda viskeulatus.
“Habemete” mahatulemise vältimiseks ei tohi nööri kerida külje servani, jättes 1,5–2,0 mm. Olenemata paigaldus- ja söötmismehhanismi tüübist on ketrusrulli jaoks oluline nõue õngenööri kerimise kvaliteet - see peaks asuma ühtlaselt kogu pooli pinnal, välja arvatud lainelised ebakorrapärasused, konarused ja langused.
Pooliprofiilide tüübid
Kõik ülaltoodud liini mähisprofiilid,on võimalik saada ühe rulliga sirge (silindrilise) paigaldusega, kasutades erineva konfiguratsiooniga vahetatavaid pooli.
Enamasti kasutatakse järgmise geomeetrilise kujuga pooli:
- silinder ("sirge")
- koonus ("kooniline")
- tagurpidi koonus ("tagurpidi koonus")
Silindrilise paigutusega rull asetab tänu pooli konstantsele sammule nööri ühtlaselt ja võrdselt kogu selle pinnale, peegeldades pooli konfiguratsiooni keritava nööri kuju järgi.
 .
.
Spinningu rulli suurus
Enamikul juhtudel kasutatakse pöörleva rulli suuruse märkimiseks kahte digitaalallkirja valikut:
Valik 1 - suurus suureneb väiksematelt numbritelt suuremaks; "1000" kuni "12000" mõõtmete juurdekasvuga "500", need. "1000", "1500", "2000", "2500" jne. Seda tähistavad suured numbrid rulli poolil. Vaata fotot 3. Traditsiooniliste püügiviiside puhul kasutatakse peamiselt rullide suurusi “1000” kuni “5000”. Suuri rulle alates “5000” ja üle selle kasutatakse püügivahendites suurte kalade kaldalt püüdmiseks, kui on vaja poolile mahutada mitu meetrit jämedat õngenööri;
2. võimalus- suurus suureneb vasakult paremale; alates "020", "025", "030" ja suuremate mõõtmete sammuga "005" .
Mõlema valiku suurused on üksteisega ligikaudu kooskõlas. Suurus "1000" vastab suurusele "020", "1500" - "025", "2000" - "030" jne.  Suuruse väärtus tähistab ja võrdleb rulli geomeetrilisi (üld)mõõtmeid, millest sõltuvad rulli kaal, nöörimaht ja võimsus. Lisaks on mõõde suhteline, sellel pole täpset standardit ja see on mõeldud sama tootja poolide esindamiseks ja võrdlemiseks.
Suuruse väärtus tähistab ja võrdleb rulli geomeetrilisi (üld)mõõtmeid, millest sõltuvad rulli kaal, nöörimaht ja võimsus. Lisaks on mõõde suhteline, sellel pole täpset standardit ja see on mõeldud sama tootja poolide esindamiseks ja võrdlemiseks.
Rullide suuruse järgi võrdlemisel suurema täpsuse huvides on vaja arvestada rulli nime ja mudelivalikuga. Fotol 3 on rulli nimi punasega esile tõstetud ja mudelivalikut tähistavad tähed “AH” enne digiallkirja “2000”.
Mis suurusega rull võtta; "1000" - "tuhat" või "2000" - "kaks tuhandik" sõltub kavatsete seda kasutada, järgides käigu kooskõla nõuet, võttes arvesse üldist a. Kergeklassi ritvadegaülikerge (UL)klassi jaoks kasutage "tuhat" või "poolteist tuhat". Valgus (L) soovitatav“poolteist tuhat” või “kaks tuhat”, põhimõtte järgi, mida võimsam ritv, seda ruumikam ja võimsam rull.
Rulli mahutavus määratakse poolile mahutava monofilamentnööri pikkuse järgi. Sõltub pooli geomeetrilistest mõõtmetest, selle läbimõõdust, pikkusest ja profiili sügavusest. Kasutades vahetatavaid erineva sügavusega pooli ühel rullikul, saate manipuleerida selle nööri läbilaskevõimega ja kasutada erinevat õngenööri.
Praktiliselt kõik ketrusrullide tootjad panevad neile vormingus soovitatavad märgised "mm/m" – joone läbimõõt/joone pikkus. Näiteks, "0.18/240 0.20/200 0.25/140" tähendab, et pooli saab poolile kerida 240 mõngenöör selle läbimõõduga 0,18 mm. või 200 mõngenöör läbimõõduga 0,20 mm või 0.25/140 vastavalt.
Rulli rootori kiirus
Rootori pöörlemiskiirus on seadistatud ülekandearv ajamimehhanism ja käepideme pöörlemiskiirus. Ülekandearvu määrab käepideme ühe pöörde ja rulli rootori teatud arvu pöörete suhe. Tähistatakse poolirullil sõnaga “Peavahekord” ja numbrite suhe. Näiteks: "5.0:1" tähendab, et ühe käepideme pöörde kohta teeb rootor viis pööret; “3,6:1” - käepideme ühe pöörde jaoks teeb rootor kolm koma kuus pööret.
Kihlveokontori ostmisel on väga oluline sellega arvestada ülekandearv, nii - kuna tänapäeval toodetavatel mähistel on lai ülekandearvude valik, alates 3.2:1 enne 7.2:1 .
Vaatamata sellele, et kõik BC-d näivad teenivat üht ühist eesmärki – kala püüda, tehakse seda erineval viisil ja erinevatel püügitingimustel, millest lähtuvalt tuleks rull valida. Selles kategoorias on kihlveokontoritel järgmine klassifikatsioon:
- madal kiirus (võimsus)- ülekandearv 3,2:1 kuni 4,3:1. Neid kasutatakse suurte (tugevate) kalade mängimiseks ja püüdmiseks, kasutades suuri ja raskeid sööta. Reeglina on neil suure mahutavusega metallist pool, varustatud võimsa käepideme ja tavapärasest suurema nöörirulliga. Mehhanismi osad on valmistatud vastupidavatest materjalidest, tagades BC mehhanismi töökindluse ja vastupidavuse koormustele. Seda tüüpi rullide puhul on eelistatud aeglane väljavõte või trollimine.
- universaalne- ülekandearv 4,5:1 kuni 6,1:1. Neil on lai valik rakendusi erinevates püügiliikides ja -meetodites (põhja-, tiku-, Bolognese jne), sealhulgas spinninguga püügil. Neid kasutatakse nii aeglaseks kui ka kiireks kättesaamiseks, erineva suuruse ja kaaluga söötadega.
- suur kiirus -ülekandearv 6,2:1 kuni 7,2:1. kasutatakse seal, kus on vaja õngenööri kiiret kerimist: teatud tüüpi ketravate valandite puhul, kui kasutatakse kergeid ja pehmeid rakisepeadega; püügiviisides, mis nõuavad varustuse sagedast heitmist ja õngelõtvu kiiret kõrvaldamist. Kiired BC-d on leidnud piisavalt rakendust nii spinningul kui tikupüügil. Ratta valimisel tuleb arvestada, et rulli ülekandearv määrab käepideme ühe täispöörde jaoks valitud õngenööri pikkuse (haav) - omadus, millel on tõsine mõju juhtmestiku tehnikale. sööt, eriti.
Käepide
 Enamik spinningurulli mudeleid on varustatud nupuvajutusega käepideme voltimissüsteem, mis võimaldab seda kergelt nuppu vajutades kiiresti kokku voltida, ja kruvimehhanismi käepideme eemaldamiseks või teisal pool rulliku teisaldamiseks (foto 4). Nendel eesmärkidel on kihlveokontoril kruvipea, mis asub käepideme vastasküljel, võimaldades teil kruvi ilma suurema pingutuseta juhtida.
Enamik spinningurulli mudeleid on varustatud nupuvajutusega käepideme voltimissüsteem, mis võimaldab seda kergelt nuppu vajutades kiiresti kokku voltida, ja kruvimehhanismi käepideme eemaldamiseks või teisal pool rulliku teisaldamiseks (foto 4). Nendel eesmärkidel on kihlveokontoril kruvipea, mis asub käepideme vastasküljel, võimaldades teil kruvi ilma suurema pingutuseta juhtida.
Kiirmudelite rullidel kasutatakse topeltkäepidet või seda täiendatakse kompensaatoriga (f ots 5), d Käte tasakaalustamatusega seotud vibratsiooni vältimiseks.
Mõnel keerlevate rullide mudelitel puudub käepideme kokkuklapimiseks surunupusüsteem ning mõlemad funktsioonid (käepideme voltimine ja ümberpaigutamine) teostatakse ühe kruvimehhanismi abil, mille kasutamisel:
käepide esmalt kokku voltida keerake kruvi lahti, avage või sulgege käepide, seejärel pingutage seda, kinnitades käepideme soovitud asendisse;
käepideme ümberpaigutamiseks mähis, keerake kruvi täielikult lahti, nihutage käepide kere teisele küljele, seejärel sisestage kruvi polüeedri avasse ja pingutage seda kuni peatumiseni.
Rootori tagasilöögitõkesti
Pöörleva rulli vastupidine liikumine- rootori ja käepideme pöörlemist loetakse suunatuks töösuunale vastupidises suunas (õngenööri kerimine poolile). Peaaegu kõigil pöörlevatel rullidel on mehhanism, mis takistab rootori ja käepideme tagurpidi pöörlemist. Teda kutsutakse: "tagurpidi stopper" või "tagurdamise vastane". Sisselülitamisel blokeerib see rulli käepideme pöörlemise "iseenda poole", takistades rootori pöörlemist vastupidises suunas, hoides sellega ära õngenööri nõrgenemisega seotud tagajärjed rulli töötamise ajal.
Tagurpidi seiskamise mehhanism asub rulli sees ja selle kere välisosas on hoob, mis aktiveerib või keelab tagasikäigu piduri.
Paljud kalurid nimetavad seda lühiduse või teadmatuse tõttu "hoob - lipp" - tagurpidi seiskamislüliti - tagurdamise vastane lüliti ise ja omistavad sellele kõige valjemad pealkirjad: " tagurpidi peatus", "tagurdamise vastane stopper", "tagurpidi lukk" jne. ,
mis eksitab ja ajab kalandusäri valdavaid inimesi segadusse.
Anti-reverse võimaldab õngitseda kala ühe käega, mis on ujukpüügil asendamatu ja spinningupüügil väga mugav. BC töömugavus ei ole tagurpidi korgi põhieesmärk, selle põhiülesanne on kaitsta rulli mehhanismi kriitiliste koormuste eest, mis on seotud tõmblustega püügi ajal, suurte kalade haakimise hetkel, surnud konksu korral ja muul viisil. sarnased olukorrad.
Tagurdusseiskamismehhanismi konstruktsioon on arenenud "sammupeatusest" "vahetu tagasikäiguvastaseks".
Astmeline tagurpidi peatus, põhineb mitme hambaga põrkmehhanismil, mis on rulli rootoriga integreeritud. Kaldhambad võimaldavad vedruga käepideme kangil liikuda mööda neid "ühes" suunas ega lase sellel liikuda "teises" suunas, toetudes pöörlemise ajal sellele vastu.
Kohene seiskamine (tagurdamise vastane) on rull-laagri baasil valmistatud ülekäigusidur. Astmelise korgi puuduseks oli käepideme lõtk, mille moodustas põrkmehhanismi külgnevate hammaste vaheline “vaba” tsoon. Selle tulemusena ei saa kork koheselt töötada ning rulli käepide ja rootor pöörlevad teatud nurga alla - "vaba mängunurk".
Sel põhjusel põhjustavad teravad tõmblused kala haakimisel või haakimisel, mis ei erine hammustusest palju, põrkmehhanismis tõsiseid põrutusi ja põhjustavad selle enneaegset riket.
Nõellaagrit kasutaval ülejooksusiduril põhineva kohese tagasikäigu stopperi konstruktsioon kõrvaldas selle puuduse täielikult, mis on eriti märgatav väheveniva põimitud õngenööri kasutamisel.
Pöörlevate rullide puhul on tagurpidi seiskamise lüliti hoova levinuim asukoht korpuse tagumise osa ülemisel platvormil. Lisaks standardsele asukohale võib see mõnel mudelil asuda korpuse alumisel pinnal rootoriga külgneval alal.
Keerulise rulli ostmisel pöörake tähelepanu:
joonerullpeavad olema valmistatud materjalidest, mis on kergelt hõõrdumistundlikud (roostevaba teras, messing või pronks korrosioonikindla karbiidkattega) ja eelistatavalt kuullaagriga;
joonerulli löök - kasutage tikku või pooleks volditud paberit, et imiteerida õngenööri liikumist mööda rulli, jälgige, et see pöörleks kergesti ja tikk või paberitükk ei libiseks mööda rulli statsionaarset pinda;
joonejuhik sulg– avage klamber ja raputage rulli järsult, simuleerides heidet; see ei tohiks spontaanselt sulguda;
rootori käik - pöörlema rootoritrullid kaks kuni kolm kiiret käepideme pööret ja vabastage see, pöörake tähelepanu rootori ja käepideme pöörlemise kestusele ilma teie abita.Selle järgi, kui kaua ja vabalt nad inertsi mõjul pöörlevad, saab hinnata rootori edenemist. Kui ajamimehhanism ei suuda inertsi tõttu pöörlemist jätkata või teeb pöörlemise ajal tundmatu päritoluga helisid, näitab see, et rootor liigub raskelt ja sellise mähise ostmisest on parem keelduda;
käepideme löök- kui käepide pöörleb aeglaselt, peab selle liikumine olema sujuv, ühtlane, ilma tõmblusteta, löökide ja kõrvaliste helideta;
mehhanismi tasakaalustamine - Mähise vibratsioon käepideme kiire pöörlemise ajal on vastuvõetamatu;
poolimäng – Põiklõtk on keelatud (pöörlemisteljega risti olevas suunas);
rulli käepide - Selle põikimäng on äärmiselt ebasoovitav. Vajalik on kontrollida käepideme kokkupanemise ja rulli teisele poole liigutamise süsteemi ;
laagrite arv– vähemalt 5 (rulli korpuse allservas, pooli all või peal märgitud “5+1” või “6”);
vahetu tagasikäigu stopper - peate veenduma, et mähise tagurpidi lukustusmehhanism töötab korralikult. Tihedalt blokeeritudkeerates käepidet enda poole,kinnitunud korgiga, näitab selle kasutuskõlblikkust;
mähise korpus- rulli korpuse visuaalne kontroll aitab tuvastada selle võimalikke defekte (praod, kriimud, mõlgid).
Nali
Kaks kalameest suhtlevad.
Esiteks.
- Eile püüdsin 120 kg väärtuses säga!
Teiseks.
- Vilkusin ka eile. Vahet pole, ma tõmbasin välja ainult ühe 20 kg väärtuses haugi. Ta hakkas seda rookima, rebis selle kõhu lahti ja seal oli vana antiikne latern, millel oli ingliskeelne kiri: "James Cook – 1764." Panin selle põlema ja see põleb...
Esimene kratsis pead.
- Kuule, ma kaotan oma sägast 90 kg, aga sina lülita taskulambi välja!
Lisateavet kalastusrullide kohta leiate artiklist
Ilusat ja edukat kalapüüki! Tähtis pole mitte tulemus, vaid protsess ise!
15.06.2012
Kuidas valida pöörlevat inertsivaba rulli?
Kaasaegne sortiment tõesti tohutu. Tootjaid on sadu ja igaühel neist on ka palju rullimudeleid ning esmapilgul näevad kõik mudelid välja peaaegu ühesugused ning hinnavahe võib ulatuda 10-kordseks. Kuidas siin mitte segadusse minna? Alustame siis sellest, et esmapilgul on kõik mähised ühesugused, aga tegelikult seisneb erinevus detailides, näiteks: materjalide kvaliteet, koostekvaliteet, insenertehniliste lahenduste täiuslikkus jne. Aga kõik need detailid otseselt mõjutada rulli töökindlust ja kasutusmugavust.
Sobiva spinningurulli valimine on isegi keerulisem kui ridv ise - selles asjas on liiga palju erinevaid nüansse. Kui aga probleemile põhjalikult läheneda ja kõik korda ajada, on valikut lihtne teha.
Peamine reegel, mis rulli valikut oluliselt lihtsustab, on: "Ruul tuleb õnge sobitada!" Õigemini, olenevalt püügitingimustest: püügiviisist, kala suurusest ja liigist. Kuid lähtume sellest, et õngeritva valikul on juba kõiki püügifaktoreid arvesse võetud ja rull valitakse harmooniliseks lisandiks.
Niisiis, hakkame kõike tükkideks panema.
Rullides kasutatud materjalid
 Rullide valmistamisel kasutatakse kahte materjali: plast ja metall. Samal ajal on sadu plastitüüpe, millest igaüks erineb tugevuse ja kulumiskindluse poolest. Metall rullides on samuti lai mõiste, sest isegi ühes mudelis saab korraga kasutada mitut tüüpi metalle. Näiteks korpus võib olla valmistatud titaanisulamist, pool valmistatud alumiiniumist, nöörijuhik roostevabast terasest, hammasrattad pronksisulamist jne. Enamikul juhtudel koosneb rullide disain nii plastikust kui ka metallist osadest, kuigi on olemas nii metallist kui ka plastikust mudeleid. Viimast pole soovitatav osta, kuna need tooted ei erine pehmelt öeldes kvaliteedi poolest.
Rullide valmistamisel kasutatakse kahte materjali: plast ja metall. Samal ajal on sadu plastitüüpe, millest igaüks erineb tugevuse ja kulumiskindluse poolest. Metall rullides on samuti lai mõiste, sest isegi ühes mudelis saab korraga kasutada mitut tüüpi metalle. Näiteks korpus võib olla valmistatud titaanisulamist, pool valmistatud alumiiniumist, nöörijuhik roostevabast terasest, hammasrattad pronksisulamist jne. Enamikul juhtudel koosneb rullide disain nii plastikust kui ka metallist osadest, kuigi on olemas nii metallist kui ka plastikust mudeleid. Viimast pole soovitatav osta, kuna need tooted ei erine pehmelt öeldes kvaliteedi poolest.
Tootjad püüavad pidevalt vähendada rullide kaalu, säilitades samal ajal nende tugevuse. Samaaegse tugevuse ja kerguse poole püüdlemise tulemusena ilmuvad igal aastal turule erinevatest kergetest ja väga vastupidavatest metallisulamitest valmistatud rullid. Jah, sellised mudelid ei ole odavad, kuid nad on seda väärt. Üldiselt on parim valik legeeritud metallist korpusega rull. Kuid mitte mingil juhul ei tohiks me süsinikkiust korpusega rulle maha kanda. Kaasaegsed süsinikkiuga tugevdatud plastid ei jää mitmes mõttes metallile alla ja on mõnes mõttes sellest paremad. Materjali järgi rulli valides tuleks suure tõenäosusega keskenduda hinnale. Kahjuks imesid ei juhtu ja madala hinna eest ei pakuta teile tõenäoliselt "superomadustega" toodet. Noh, kõrge hinna eest sobivad nii metallist mähis kui ka süsinikkiud.
Inertsivaba mähise ülekandearv
Ülekandearv on parameeter, mis tähendab käepideme ühe täispöörde ja joonekihi pöörete arvu suhet. Selle parameetri järgi jagunevad poolid kiireks ja võimsuseks. Ülekandearvu saab rulli korpusel näidata järgmise väljendiga: 5,0: 1, 5,3: 1 jne. See silt tähendab, et üks vastab käepideme ühele pöördele ja teine number tähistab joonekihi vastavat pöörete arvu. Mida suurem on suhe, seda kiirem on mähis ja vastupidi, mida madalam on suhe, seda võimsam on mähis. Jõumudelite hulka kuuluvad rullid, mille ülekandearv on kuni 5,0: 1 (4,0: 1, 4,3: 1 jne), ja kiirete rullide hulka kuuluvad mudelid, mille ülekandearv on üle 5,0: 1 (5,3:1, 6,0: 1 ja jne). Rulli kiirusomadused sõltuvad eelkõige põhikäigu hammaste suurusest. Kuid ärgem süvenegem sellisesse tehnilisse džunglisse, niikuinii ei lase keegi teil rulli enne ostmist lahti võtta. Praktilisest küljest on jõurullid head nii suurte kalade püüdmiseks kui ka “kõrgepingeliste” söötade abil välja tõmbamiseks. Kiirmudelid on väiksema jõuvaruga, kuid võimaldavad väga kiiresti nööri välja kerida, mis on teatud püügiviiside puhul väga oluline, näiteks jigiga püügil. Valik tugevuse ja kiiruse vahel sõltub täielikult kavandatavatest püügiobjektidest - jahime ainult "krokodille", siis võtame jõumudeli ja kui soovite rohkem mitmekülgsust, võib valiku teha "kuldse keskmise" - rullide järgi. ülekandearvuga 5,0: 1 või indikaatoriga, mis on sellele väärtusele lähedane.
Rullide mõõtmed ja kaal
Nagu eespool mainitud, toovad tootjad igal aastal turule üha kergemaid rullikuid, ilma et see kahjustaks nende töökindlust. Nad teevad seda põhjusega, sest mida kergem on rull, seda mõnusam on püüda, kuid ekstreemsustesse laskumine on samuti lubamatu. Peaasi, et rulli kaal ja suurus oleks ridvaga tasakaalus. Milline on ridva ja rulli tasakaal, seda on raske kirjeldada, seda tuleb tunnetada. Rulli kaalu osas on arvamus, et rulli kaal peaks vastama ligikaudu kahele ridva raskusele, pluss-miinus 30 grammi. Näiteks ridva kaal on 100g, mis tähendab, et rulli kaal peaks olema umbes 200g pluss-miinus 30 grammi. Tõsi, see reegel on mõnevõrra meelevaldne, kuid enamikul juhtudel see töötab.
Kõigil rullidel on nn suurus, mis on märgitud numbritega: 500, 1000, 2000 jne. Kuid see pole probleem; poolide suuruste klassifikatsioon ei ole tootjate seas ikka veel ühtne. Seega, kui võtate kätte tuhande suurusega rulli kahelt erinevalt tootjalt, näete visuaalselt väikest erinevust suuruses. Kuigi väärib märkimist, et enamik tootjaid aktsepteeris endiselt Shimano väljatöötatud suurusklassifikatsiooni standardina.
Õige suurusega rulli valimiseks tuleb arvestada selliste ridva parameetritega nagu pikkus ja test. Allpool on tabel, mis kirjeldab õnge tehniliste parameetrite ja rulli suuruse vahelist seost. Arvame, et tabeli põhimõte on selge. Oletame, et meil on ritv pikkusega 220 cm ja testkaaluga 10-25 grammi. Vaatame tabelit. Meie spinningu ridva pikkus kuulub kategooriasse “KUNI 240” ja testi järgi rohkem kategooriasse “15-30”, seega on sobiv rulli suurus 2000-2500.
|
Varda pikkus, cm |
Vardakatse, g |
Numbri suurus vastavaltShimano |
Hõõrdpidur
Hõõrdepidur on rullimehhanism, mis võimaldab kala tugeva tõmbluse korral nööri automaatselt lahti lasta. Tänu hõõrdpidurile on õngede katkemised püügil viidud miinimumini. Peaasi, et pidur oleks õigesti seadistatud. Selle mehhanismi kvaliteet määrab otseselt kalajooksude arvu ja õngevahede arvu. Mida sujuvam on pidurite seadistus, seda parem. Kvaliteetsete rullide puhul on hõõrdpidur väga sujuva seadistusega ja sellel on ka blokeerumisvastane funktsioon. Blokeerumisvastane funktsioon võimaldab nööri vabastada, kui kala tugevalt tõmbleb, isegi kui hõõrdpidur on maksimaalses asendis. Mitteblokeeruva pidurisüsteemi eelised on ilmsed. Harvad pole juhtumid, kus õngitseja unustab lihtsalt siduri lahti lasta ja püüab tugevalt pingutatud piduriga kala. Suur kala hammustab, üks võimas jõnks ja nöör katkeb. Ja kui rull on varustatud mitteblokeeruva hõõrdpiduriga, siis sellist probleemi ei juhtu.
Hõõrdepidureid on kahte tüüpi – eesmised ja tagumised. Raske on öelda, milline neist on parem, sest need töötavad võrdselt tõhusalt, kuid kasutusmugavuse osas on teie otsustada, milline neist teile kõige rohkem meeldib. Siiski on arvamus, et eesmine hõõrdpidur on töökindlam kui tagumine, kuigi töökindluse erinevus pole eriti märgatav. Selgelt on tunda erinevust häälestuse täpsuses ja sujuvuses ning selles osas võidab esisidur. Praktika näitab, et nii ühe kui ka teise tüübiga saab kergesti harjuda, aga kui oled juba ühega “konksus”, siis on juba raske teisele tüübile üle minna. See on harjumus ja ei midagi enamat.
 Pool on rulli disaini eemaldatav element, mis toimib nööri salvestusseadmena. Poolid on plastikust ja metallist. Eelistatav on metallist pool, mis sobib suurepäraselt nii monofilamentõnge kui ka punutud nööride kasutamiseks. Kuid plastpooli saab kasutada ainult õngenööriga. Nagu praktika näitab, lihvib punutud nöör aja jooksul lihtsalt plastikpooli külje maha, mis rikub nii pooli kui ka nööri. Pealegi on seda probleemi märgatud isegi väga vastupidavast plastikust poolidel.
Pool on rulli disaini eemaldatav element, mis toimib nööri salvestusseadmena. Poolid on plastikust ja metallist. Eelistatav on metallist pool, mis sobib suurepäraselt nii monofilamentõnge kui ka punutud nööride kasutamiseks. Kuid plastpooli saab kasutada ainult õngenööriga. Nagu praktika näitab, lihvib punutud nöör aja jooksul lihtsalt plastikpooli külje maha, mis rikub nii pooli kui ka nööri. Pealegi on seda probleemi märgatud isegi väga vastupidavast plastikust poolidel.
Poolid erinevad ka nöörimahtuvuse poolest. Tavaliselt on võimsus meetrites märgitud poolile iga konkreetse nööri läbimõõdu kohta. Tähelepanu, poolile märgitud mahuteave kehtib ainult õngenööri kohta, kuid see ei kehti punutud nööri kohta.
Teine erinevus on nn pooli geomeetria, see tähendab sügavuse ja laiuse suhe. Pooli geomeetria jaoks on kaks peamist võimalust – klassikaline (kui laius on ligikaudu võrdne sügavusega) ja teine võimalus on Long Cast geomeetria (kui pooli sügavus pole suur, kuid pikkust suurendatakse. Long Cast geomeetriaga poolid omavad heiteulatuse osas eelist “klassika ees” Tuleb märkida, et mõnele rullimudelile saab panna erineva suurusega pooli.Näiteks mõnele 2000. suuruses rullimudelile saab panna nii 2000. suuruse pooli. ja 1500. suurus. See tähendab, et lihtsalt pooli vahetades saame veidi erineva suurusega rulli. Selle funktsiooni eelised on ilmsed.
Paljud rullide mudelid on varustatud varupooliga ja see on hea, sest sellest ajast alates on võimalik varustada üks pool õngenööriga ja teine nööriga. Mõnel juhul on kalapüügil nii õngenööri kui ka nööri olemasolu väga kasulik. Näiteks kui püütakse ühe spinninguga ja ühe rulliga, kuid kasutatakse erinevaid spinningupüügi meetodeid. Niisiis, nöör sobib paremini jigimiseks ja õngenöör spinneritega püügiks. Ja selgub, et ilma ketrusvarda ja rulli vahetamata, vaid ainult pooli ümber paigutades valmistame universaalse varustuse. Kui valitud rullimudelil ei ole lisapooli kaasas, pole vahet – saate selle eraldi osta, kuigi mõne mudeli puhul pole see lihtne, kuid kes otsib, see leiab!
Laagrite arv
Pöörleva rulli kujunduses on laagritel väga oluline roll ning nende kvaliteedist ja kvantiteedist sõltub suuresti kogu rulli jõudlus. Suur hulk laagreid rullil ei tähenda aga, et toode oleks kvaliteetne. Enamasti on rulli “üleküllastamine” laagritega lihtsalt turundustrikk. Hiina “käsitöölised” on selles eriti süüdi. Tegelikult on optimaalne laagrite arv rullis 4-6 tükki.
Rulli käepide
Enamik rullimudeleid on varustatud käepidemetega, mida saab ümber paigutada nii vasaku kui ka parema käe jaoks, kuid on mudeleid, mille puhul käepidet ümber ei paigutata, see tähendab, et see on püsivalt paigaldatud ühele küljele. Ja ostmisel peate selles küsimuses olema ettevaatlik. Mis puudutab käepideme ergonoomilisust, siis valikuvõimalusi on sadu, kui mitte tuhandeid – erinevaid kujundeid, materjale jne. Ja siin on mõttetu nõu anda, kuna igaühel on oma maitse. Kuid käepideme transpordiasendisse viimise mehhanismi põhjal võime öelda, et parem on võtta rull, milles käepide käib kruvi lahti keerates. Nagu praktika näitab, kuluvad käepideme kiireks transpordiasendisse viimise mehhanismid kiiresti ja selle tulemusena tekib ebameeldiv tagasilöök.
Kaubamärgid
Kui kalapoode läbi sirvida, võib nüüd kokku lugeda vähemalt sada rulle tootvat tootjat. Tõsi, lõviosa neist pole just tuntud Aasia kaubamärgid.
Tõelised turuliidrid on Jaapani ettevõtted Shimano ja Daiwa. Tegemist on pikaaegsete konkurentidega ja võistlusvõitluses, püüdes üksteisest ette jõuda, oldi alati kõigist sammu võrra ees. Raske öelda, kumb neist parem on, kuid üks on kindel – Shimano või Daiwa rull ei valmista oma kvaliteedis pettumust. Ausalt öeldes tasub märkida, et tänapäeval valmistavad paljud tootjad kvaliteetseid rulle ja mis kõige parem on see, et need on kvaliteetsed üsna liberaalsete hindadega. Loetleme vaid tootjad, kelle rullidel on hea maine. Seega on need Ryobi (Jaapan), Mitchell (Prantsusmaa), Abu Garcia (Rootsi), SPRO (Holland), Zebco (USA), Okuma (Hiina), Salmo (Läti) ja paljud teised.
Oletame, et teie nõudmiste põhjal on teil silma peal mitmel rullikumudelil ja tekib küsimus: "Millise rulli peaksite võtma?" Ja siin võib Internet teile appi tulla, õnneks on see nüüd kõikjal saadaval. Kuidas ta saab aidata? Ja see on lihtne – minge kalastusfoorumitesse ja lugege konkreetsete rullide omanike arvustusi. Muidugi tuleks sellistest arvustustest saadud teave "filtreerida", sest vanasõna: "Iga tiib kiidab oma sood" pole tühistatud! Loeme, filtreerime, mõtleme ja teeme õige valiku!
Loodame, et artiklis esitatud teave aitab teil teha õige valiku! Siiski tuleb meeles pidada, et rull teenib kaua ja usaldusväärselt ainult siis, kui seda õigesti kasutada. Ka kõige kallim rull võib mõne püügireisi jooksul hävida, seega pole vaja kasutusreegleid eirata! Aga see on teine teema.
Näitamiste arv: 79186
Mida sa mõtled sõna "rull" all? Noh... see on ilmselt mingi “viigimarja”, millel niidid, õngenöör, köis, mida iganes! Induktiivpool on täpselt sama asi, aga sinna on keerme, õngenööri või muu asemel keritud tavaline isolatsioonis olev vasktraat.
Isolatsioon võib olla valmistatud läbipaistvast lakist, PVC isolatsioonist või isegi kangast. Nipp seisneb siin selles, et kuigi induktiivpooli juhtmed on üksteisele väga lähedal, on nad siiski üksteisest isoleeritud. Kui kerite induktiivpoolid oma kätega, ärge mingil juhul mõelge tavalise palja vasktraadi kasutamisele!
Induktiivsus
Igal induktoril on induktiivsus. Pooli induktiivsust mõõdetakse Henry(Gn), tähistatud tähega L ja seda mõõdetakse LC-meetriga.
Mis on induktiivsus? Kui elektrivool lastakse läbi juhtme, tekitab see enda ümber magnetvälja:
Kus
B – magnetväli, Wb
mina –
Võtame selle traadi ja kerime selle spiraaliks ja paneme selle otstesse pinget

Ja me saame selle pildi magnetiliste jõujoontega:

Jämedalt öeldes, mida rohkem magnetvälja jooni läbib selle solenoidi pindala, meie puhul silindri pindala, seda suurem on magnetvoog (F). Kuna mähise kaudu voolab elektrivool, siis see tähendab, et seda läbib voolutugevus voolutugevusega (mina), ja magnetvoo ja voolutugevuse vahelist koefitsienti nimetatakse induktiivsuseks ja see arvutatakse järgmise valemiga:

Teaduslikust vaatenurgast on induktiivsus võime ammutada elektrivoolu allikast energiat ja salvestada seda magnetvälja kujul. Kui voolutugevus mähises suureneb, siis pooli ümbritsev magnetväli laieneb ja kui vool väheneb, siis magnetväli tõmbub kokku.
Eneseinduktsioon
Induktiivpoolil on ka väga huvitav omadus. Kui mähisele rakendatakse konstantset pinget, ilmub mähisesse lühikeseks ajaks vastupidine pinge.
Seda vastupidist pinget nimetatakse Enese esilekutsutud emf. See sõltub mähise induktiivsuse väärtusest. Seetõttu muudab vool poolile pinge rakendamise hetkel oma väärtust järk-järgult sekundi murdosa jooksul 0-st teatud väärtuseni, kuna pinge elektrivoolu rakendamise hetkel muudab oma väärtust ka nullist püsiva väärtuseni. Ohmi seaduse järgi:

Kus
I– voolutugevus mähises, A
U– pinge mähises, V
R- mähise takistus, ohm
Nagu valemist näeme, muutub pinge nullist mähisele antud pingele, mistõttu muutub ka vool nullist mingi väärtuseni. Alalisvoolu pooli takistus on samuti konstantne.
Ja teine nähtus induktiivpoolis on see, et kui me avame vooluringi induktiivpooli ja vooluallika vahel, siis meie iseinduktsiooni emf lisandub sellele pingele, mille oleme juba poolile rakendanud.
See tähendab, et niipea, kui me vooluringi katkestame, võib mähise pinge sel hetkel olla mitu korda suurem kui enne vooluringi katkemist ja voolutugevus mähise vooluringis langeb vaikselt, kuna iseinduktsioon emf säilitab langeva pinge.
Teeme esimesed järeldused induktiivpooli töö kohta, kui sellele antakse alalisvool. Kui mähisele antakse elektrivool, suureneb voolutugevus järk-järgult ja kui elektrivool mähisest eemaldatakse, väheneb voolutugevus sujuvalt nullini. Ühesõnaga, voolutugevus mähises ei saa hetkega muutuda.
Induktiivpoolide tüübid
Induktiivpoolid jagunevad peamiselt kahte klassi: magnetilise ja mittemagnetilise südamikuga. Alloleval fotol on mittemagnetilise südamikuga mähis.
Aga kus on tema tuum? Õhk on mittemagnetiline tuum :-). Selliseid pooli saab kerida ka mõnele silindrilisele pabertorule. Kui induktiivsus ei ületa 5 millihenrit, kasutatakse mittemagnetilise südamikuga induktiivpooli.
Ja siin on südamikuga induktiivpoolid:

Peamiselt kasutatakse ferriit- ja raudplaatidest südamikke. Südamikud suurendavad oluliselt mähiste induktiivsust. Rõngakujulised südamikud (toroidaalsed) võimaldavad teil saavutada suurema induktiivsuse kui lihtsalt silindri südamikud.
Keskmise induktiivsusega mähiste jaoks kasutatakse ferriitsüdamike:

Suure induktiivsusega mähised on valmistatud nagu raudsüdamikuga trafo, kuid erinevalt trafost ühe mähisega.

Lämbused
Samuti on olemas spetsiaalne induktiivpool. Need on nn. Induktiivpool on induktiivpool, mille ülesandeks on tekitada ahelas suur takistus vahelduvvoolule kõrgsagedusvoolude summutamiseks.
Alalisvool läbib induktiivpooli probleemideta. Sellest artiklist saate lugeda, miks see juhtub. Tavaliselt on drosselid ühendatud võimendusseadmete toiteahelates. Drosselid on loodud kaitsma toiteallikaid kõrgsageduslike signaalide (RF-signaalide) eest. Madalatel sagedustel (LF) kasutatakse neid toiteahelates ja neil on tavaliselt metallist või ferriidist südamikud. Alloleval fotol on drosselid:

Samuti on veel üks spetsiaalne drosseltüüp – see. See koosneb kahest vastaspooliga induktiivpoolist. Tänu vastumähisele ja vastastikusele induktsioonile on see tõhusam. Twin drosselid on laialdaselt kasutusel toiteallikate sisendfiltritena, aga ka helitehnoloogias.

Katsed mähisega
Millistest teguritest sõltub pooli induktiivsus? Teeme mõned katsed. Kerisin mittemagnetilise südamikuga pooli. Selle induktiivsus on nii väike, et LC-meeter näitab mulle nulli.

Sellel on ferriitsüdamik

Hakkan sisestama mähist südamikusse kuni servani

LC-meeter näitab 21 mikrohenrit.
Sisestan mähise ferriidi keskele

35 mikrohenrit. Juba parem.
Jätkan mähise sisestamist ferriidi paremasse serva

20 mikrohenrit. Me järeldame Suurim induktiivsus silindrilisel ferriidil esineb selle keskel. Seega, kui kerite silindrile, proovige kerida ferriidi keskel. Seda omadust kasutatakse muutuvate induktiivpoolide induktiivsuse sujuvaks muutmiseks:

Kus
1 – see on mähisraam
2 – need on pooli pöörded
3 – südamik, millel on peal soon väikese kruvikeeraja jaoks. Südamikku keerates või lahti keerates muudame seeläbi mähise induktiivsust.

Induktiivsus on muutunud peaaegu 50 mikrohenrit!
Proovime pöördeid kogu ferriidi ulatuses sirgeks ajada

13 mikrohenrit. Me järeldame: Maksimaalse induktiivsuse saavutamiseks tuleb mähis keerata "pöördeks".
Vähendame pooli pöördeid poole võrra. Seal oli 24 orbiiti, nüüd on 12.

Väga madal induktiivsus. Vähendasin pöörete arvu 2 korda, induktiivsus vähenes 10 korda. Järeldus: mida väiksem on pöörete arv, seda väiksem on induktiivsus ja vastupidi. Induktiivsus ei muutu lineaarselt pöörete lõikes.
Katsetame ferriitrõngaga.

Mõõdame induktiivsust

15 mikrohenrit
Liigutame pooli pöördeid üksteisest eemale

Mõõdame uuesti

Hmm, ka 15 mikrohenrit. Me järeldame: Kaugus pöördest pöördeni ei mängi toroidaalses induktiivpoolis mingit rolli.
Teeme rohkem pöördeid. Seal oli 3 pööret, nüüd on 9.

Me mõõdame

Vau! Suurendas pöörete arvu 3 korda ja induktiivsust 12 korda! Järeldus: Induktiivsus ei muutu lineaarselt pöörete lõikes.
Kui usute induktiivsuse arvutamise valemeid, induktiivsus sõltub "pöörete ruudust". Ma ei postita neid valemeid siia, sest ma ei näe vajadust. Ütlen ainult, et induktiivsus sõltub ka sellistest parameetritest nagu südamik (mis materjalist see on valmistatud), südamiku ristlõikepindala ja mähise pikkus.
Tähistus diagrammidel

Poolide jada- ja paralleelühendus
Kell induktiivpoolide jadaühendus, on nende koguinduktiivsus võrdne induktiivsuste summaga.

Ja millal paralleelühendus saame selle:

Induktiivsuste ühendamisel tuleb teha järgmist: Reegel on see, et need peaksid olema tahvlil ruumiliselt paigutatud. Selle põhjuseks on asjaolu, et kui need on üksteise lähedal, mõjutavad nende magnetväljad üksteist ja seetõttu on induktiivsuse näidud valed. Ärge asetage kahte või enamat toroidpooli ühele raua teljele. Selle tulemuseks võivad olla valed koguinduktiivsuse näidud.
Kokkuvõte
Induktiivpool mängib väga olulist rolli elektroonikas, eriti transiiveriseadmetes. Induktiivpoolidele ehitatakse ka erinevat tüüpi elektroonilisi raadioseadmeid ning elektrotehnikas kasutatakse seda ka voolupinge piirajana.
Soldering Ironi kutid tegid väga hea video induktiivpoolist. Soovitan kindlasti vaadata:
Inertsiaalsed rullid (rattad)
eeliseid.
TO puudused Need mähised hõlmavad järgmist:

kiirteed võimsus universaalne
Kordajate rullid

trollimine ja eest ketramine.
Võimas trollimisrullid
Keerutavad rullid klassikalineseebinõud
Pooli suurus ja materjal
Käiguarv
Universaalne - 4,6 kuni 5,5
Hõõrdpidur
Esi sidur
Tagumine sidur
Laagrite arv
Liini paigaldamise masin
Rulli käepide
Indeksid
FA, FB, FC
PG (jõuseade)
XG (eriti kõrge käik)- väga kõrge,
HG (kõrge käik)
S- väike pool,
D.H.- kahekordne käepide,
C
Rullid Saate osta meie veebipoes.
Tackle'i kvaliteet sõltub suuresti rullist. Seetõttu on õige rulli valimine kalapüügiks valmistumise lahutamatu osa.
Rullid peaksid võimalikult palju kokku sobima ülejäänud varustusega ning lennukimootorit ei tohiks “käru” peale panna (see ei tõuse nagunii õhku). Väikesed rullid asetatakse kergetele ja painduvatele ujukõngedele ja mõnele muule õngedele, suuremad rullid asetatakse raskematele, pika ja tugeva õngenööriga ritvadele raskeks ja aktiivseks spinningupüügiks.
Rullide valik on tohutu – väikestest traatrullidest kuni hiiglaslike sägarullide ja merepüügi rullideni.
Ka rullide disain on mitmekesine – alates väga primitiivsetest mudelitest kuni rullideni, mis on võimelised iseseisvalt kala püüdma (sisseehitatud elektrimootor) ja varustatud elektroonilise ekraaniga, mis näitab püütud kala ligikaudset suurust.
Kõige üldisemal kujul koosneb rull teljega korpusest ja sellel teljel pöörlevate käepidemetega trumlist (poolist). Kerel on jalg rulli vardale paigaldamiseks, samuti piduriseade.
Trummid on mõeldud kerima 30 m kuni 400 m õngenööri.
Rullide osad on valmistatud plastikust, keraamikast, grafiidist ja metallist (alumiinium, anodeeritud duralumiinium, kõrglegeeritud roostevaba teras, titaan, pronks). Osad on kaetud kroomitud metalli ja tefloniga.
Kõik rullid jagunevad kolme tüüpi: inertsiaalsed, inertsivabad ja kordajad. Olenevalt püügiviisist valitakse üht või teist tüüpi rull.
Inertsiaalsed rullid (rattad)
Inertsiaalpoolid ilmusid varem kui teised.
Sellise rulli trumli pöörlemistelg asub õngeritva teljega risti.
Pöörlemiskäepide asub trumli kaane serval. Üks trumli pööre võrdub ühe joonepöördega. Riiuli heitmisel trummel pöörleb ja sellel on düüsi lendu pidurdav mõju.
Selle rullide klassi parimatel mudelitel on valik eeliseid.
- Esimene on õngitseja otsene kokkupuude söödaga, mida ei halvenda ülekandeühenduste mass, nagu teiste tüüpide puhul.
- Teine on võimsus (suur tõukejõud): õngitseja pingutust ei nõrgenda arvukad käigud, lisaks pole sellisel rullil suure koormuse korral praktiliselt midagi puruneda.
- Seadme lihtsus määrab selliste poolide hooldamise lihtsuse ja suhteliselt madala hinna.
TO puudused Need mähised hõlmavad järgmist:
- kergete söötade lühike loopimine (trumli inertsi tõttu),
- "habemete" ilmumine (kui trummel pöörleb veidi kiiremini kui nöör lahti kerib),
- vajadus märkimisväärse ruumi järele kiige jaoks valamisel.
Lihtsus ja odavus teevad need rullid muidugi avalikkusele kättesaadavaks, kuid valamise protsess nõuab teatud oskust (saavutatakse kogemusega), vastasel juhul ei saa vältida eelmainitud “habet” ja pikka õngenööri lahtiharutamist.
Inertsivabad rullid (lihaveskid)
Inertsivabade rullide puhul õngenööriga trummel (pool) ei pöörle ja õngenöör tuleb pooli otsast praktiliselt vastupanuta vajaliku pikkusega lahti. Tänu sellele saate sööta visata palju kaugemale kui inertsiaalrulliga.
Inertsivaba rulli pooli pöörlemistelg on paralleelne varda teljega.
Nöör keritakse rullile käepidet pöörates.
Vastavalt rootori pöörlemiskiirusele jagatakse poolid kiirteed, ülekandearvuga (trumli pöörete arv trumli pöörde kohta) vahemikus 1:6 kuni 1:7,2 ja võimsus, numbriga 1:4 kuni 1:4,5. TO universaalne Nende hulka kuuluvad rullid ülekandearvuga 1:5 kuni 1:5,5.
Inertsivabade poolide komponendid peavad vastama järgmistele tingimustele.
Soovitav on, et pooli korpus oleks metallist.
Pooli külg (nöör hõõrdub vastu) peaks olema valmistatud mitteabrasiivsest materjalist (soovitavalt titaannitriid).
Kalleimad poolid on metallist, odavamad grafiidist, duralumiiniumist ja plastikust.
Nöörikiht (tagab õngenööri ühtlase mähise) tuleks teha nagu lõputu kruvi (uss), siis asetsevad õngenööri kihid risti, mis takistab “habeme” teket.
Liinirull peab olema kulumiskindel, eelistatavalt titaannitriidist.
Hõõrdepidur on mõeldud õngenööri vabastamiseks kriitiliste koormuste korral: haakimine, kalapüük, konksud. Tänu temale keerab pool lihtsalt ringi ja “ulatab” nööri. Sellel peaks olema sujuv reguleerimine ja see ei tohiks spontaanselt jõudu muuta.
Käik peab olema kulumiskindlast materjalist, muud materjalid ei ole vastupidavad. Soovitatav on ajami paari käigul olla kaitsme, et minimeerida haakimisel ja väljavõtmisel tekkivaid lööke.
Tavaliselt kasutab rull kuni 15 laagrit. Soovitav on, et neid oleks vähemalt neli.
Kokku on mähisel olenevalt konstruktsioonist kuni 20 hõõrdeüksust. Olulisemad komponendid, kus laagrid on vajalikud, on rootori peaülekande väikesed ja suured käigud, liinirullik, sõukruvi toed ja käepideme käepide.
Piisava arvu laagritega rull on vastupidav, vastupidav ülekoormustele ja töökindlate piduritega. Ilma laagriteta rullid kipuvad olema raskemad, jäigemad ja vähem vastupidavad.
Ostmisel tuleks tähelepanu pöörata liikumise kvaliteedile (pool ja käepide peaksid kergelt ja vaikselt pöörlema) ning tagasilöögi puudumisele (lubatud on ainult pooli aksiaalne lõtk).
Kordajate rullid
Multiplikaatorirullid on omamoodi sümbioos kahest eelmisest mudelist. Trumli pöörlemistelg asub sarnaselt inertsiaalrullide omaga varda teljega risti olevale tasapinnale. Trummel pöörleb ka valamisel, kuid sellel pole palju inertsiaalset massi, kuna see kujutab endast enam-vähem paksu telge.
Inertsivabalt rullilt pärandati ülekandemehhanism, mis suurendas trumli pöörete arvu käepideme pööramisel ülekandearvuga 1:3-lt 1:5,2-le.
Ka “lihaveskitest” võeti vastu tagurpidi blokeerimine ja kriitiliste koormuste korral automaatse nööri vabastamise süsteem (hõõrdepidur), mis võimaldab kasutada kergeid söötasid.
Kuigi paljundusrullid jäävad heite- ja kerimiskiiruselt alla inertsivabadele rullidele, on nad neist paremad tõmbejõu ja tundlikkuse poolest ning on ka töökindlamad ja vastupidavamad.
Saadaval on kordusrullid trollimine ja eest ketramine.
Võimas trollimisrullid kasutatakse peamiselt merepüügiks.
Keerutavad rullid on saadaval kahes versioonis: " klassikaline" - töötab hästi keskmiste ja raskete lisadega ning nn. seebinõud" - tundlikum magnetpiduriga kergete lisadega töötamiseks.
Selle klassi rullid nõuavad kalamehe teatud kvalifikatsiooni (heitmisel ja väljavõtmisel), kuid kui teil pole inertsiaalrullide kasutamisel probleeme, siis ei tohiks paljundusrullidele üleminekul erilisi raskusi tekkida (heide ja väljavõtmine ei ole põhimõtteliselt erinevad).
Peamised punktid, mida rulli valimisel arvestada.
Pooli suurus ja materjal
Iga rull on tähistatud numbriga, näiteks 2000 - see on pooli suurus, see tähendab selle suurus. Olenevalt pooli suurusest saab iga rull kasutada ainult teatud nööri paksust ja pikkust. Need väärtused on märgitud poolile. Feederpüügiks piisab täiesti 3000 suurusest poolist, kuid mitte vähem kui 2000.
Tavaliselt on poolid valmistatud metallist, grafiidist ja plastikust. Metallist poolid, näiteks alumiinium, on mugavad põimitud õngenööri (nööride) jaoks, grafiit - õngenööri jaoks.
Plastist pooli on parem mitte võtta - need on väga lühiajalised. Pooli võib katta ka titaannitritiga. See on vajalik tagamaks, et pool on sile ja kriimustusteta. See pikendab kahtlemata õngenööri, eriti põimitud nööri kasutusiga (säästedes seda enneaegse narmendamise eest).
Valige varupooliga rull, eriti kui püüate mitmel erineval viisil. Parim on, kui teil on üks metallist ja üks grafiidist pool. Samuti on tagavarapool mugav kiireks vahetamiseks juhuks, kui nöör puruneb või vajate erineva läbimõõduga nööri.
Käiguarv
Ülekandearv on parameeter, mis tähendab käepideme ühe täispöörde ja joonekihi pöörete arvu suhet. Ülekandearvu saab rulli korpusel näidata järgmise väljendiga: 5,0: 1, 5,3: 1 jne. See silt tähendab, et üks vastab käepideme ühele pöördele ja teine number tähistab joonekihi vastavat pöörete arvu. Mida suurem on suhe, seda kiirem on mähis ja vastupidi, mida madalam on suhe, seda võimsam on mähis. Selle parameetri järgi jagunevad rullid järgmisteks osadeks:
Võimsus või veojõud – esimene number on kuni 4,6. Mõeldud suurte kalade püüdmiseks, kui on vaja ületada suuri koormusi.
Universaalne - 4,6 kuni 5,5
Kiirus - alates 5,5 ja rohkem. Kasutatakse kalastamiseks üsna kiire kättesaamisega. Sellised mähised on tundlikumad.
Seetõttu kasutatakse ujukipüügil kiirrullid, spinninguga püügiks sobivad aga pigem jõurullid.
Hõõrdpidur
Hõõrdepidur vabastab kala mängides õngenööri, vabastades seeläbi koormuse õngenöörilt ja ridva toorikult. Hoiab ära kõigi käikude purunemise ja purunemise. Hõõrdepidureid on kahte tüüpi: eesmised ja tagumised:
Esi sidur mugavam asukoht. See muudab rulli kompaktsemaks ja kergemaks. Seda on lihtsam reguleerida ja pidurdusjõud on suurem.
Tagumine sidur Sobib kalapüügi reguleerimiseks. Samuti on pooli vahetamine palju kiirem. Tagumisel siduril on aga halb omadus - see kerib tasapisi lahti ja seda tuleb pingutada.
Laagrite arv
Ühes rullis võib olla kuni 15 tükki. 4-6 laagrit on täiesti piisav. Need muudavad mehhanismide töö sujuvamaks ja stabiilsemaks. Ilma laagriteta rullid ei tööta ja muutuvad kiiresti kasutuskõlbmatuks. Tavaliselt tehakse odavad rullid ilma laagriteta, mille osad pole just kõige kvaliteetsemad.
Mida rohkem laagreid, seda suurem on rulli kaal ja seda kallim see on. Rulle ei tasu aga valida laagrite arvu järgi, siis on tuntud firmade kvaliteetsed suure laagrite arvuga rullid väga kallid ja Hiina omad odavad, aga kui võrrelda mõlema laagri kvaliteeti , siis lähevad hiina omad üsna kiiresti laiali ja sellised rullid kestavad sind palju vähem.kui kvaliteetsemad rullid tuntud kaubamärkidelt nagu Mitchel või Shimano palju vähema laagritega.
Liini paigaldamise masin
Õngastusvars peab olema avatud asendis jäiga fikseerimisega, vastasel juhul võib see heitmise ajal püügil sulguda, teie lemmiksööt tuleb lahti ja lendab püütud veehoidla sügavusse (nn "söödalaskmine"). ). Kinnitust on lihtne kontrollida – avage käepide ja raputage rullikut mitu korda jõuliselt (nagu heidaks).
Kui vibu sulgub kergesti, siis tõenäoliselt veab selline rull teid "lahinguväljal" mitu korda alt. Käepideme täispöörde tegemisel peaks vibu ise sulguma. Tehke seda mitu korda, et veenduda, et see töötab hästi.
Väga oluline on, et vööri sulgemisel kukuks nöör kohe rullile, ilma et ta millegi külge takerduks. Kontrollige hoolikalt vöörist rullile ülemineku pinda, joone teekonnal ei tohiks olla jäsemeid, eendeid, ebakorrapärasusi ega muid sarnaseid probleeme. Joonerull peaks kergesti pöörlema (isegi väikseima puudutuse korral).
Rulli käepide
Enamik rullimudeleid on varustatud käepidemetega, mida saab ümber paigutada nii vasaku kui ka parema käe jaoks, kuid on mudeleid, mille puhul käepidet ümber ei paigutata, see tähendab, et see on püsivalt paigaldatud ühele küljele. Ja ostmisel peate selles küsimuses olema ettevaatlik. Mis puudutab käepideme ergonoomilisust, siis valikuvõimalusi on sadu, kui mitte tuhandeid – erinevaid kujundeid, materjale jne. Ja siin on mõttetu nõu anda, kuna igaühel on oma maitse.
Kuid käepideme transpordiasendisse viimise mehhanismi põhjal võime öelda, et parem on võtta rull, milles käepide käib kruvi lahti keerates. Nagu praktika näitab, kuluvad käepideme kiireks transpordiasendisse viimise mehhanismid kiiresti ja selle tulemusena tekib ebameeldiv tagasilöök.
Indeksid
Sageli võib mähise nimest leida indekseid (tähetähistusi), vähesed teavad, mida need tähendavad.
FA, FB, FC rulli nimes tähendab, et rull on mõeldud Euroopa turule. F - näitab, millise turu jaoks rull toodeti, antud juhul Euroopa jaoks, teine täht - seeria põlvkond (modifikatsioon). Need. kui täht A on kõige varasem seeria (esimene), siis B on vastavalt hilisem jne. ladina tähestiku järgi. Jaapani turu jaoks toodetud rullidel puuduvad tähe eesliited.
Samuti võite mähise nimest leida selliseid indekseid nagu:
PG (jõuseade) näitab madalat käiku,
XG (eriti kõrge käik)- väga kõrge,
HG (kõrge käik)- näitab ülesõitu,
S- väike pool,
D.H.- kahekordne käepide,
C- mähise ja eelmise tegeliku suuruse suhe (korpus, rootor).
Tere tulemast kõigile meie kodulehele!
Õpime edasi elektroonika algusest, st põhitõdedest, ja tänase artikli teema saab olema induktiivpoolide tööpõhimõte ja põhiomadused. Tulevikku vaadates ütlen, et kõigepealt arutame teoreetilisi aspekte ja mitmed tulevased artiklid on täielikult pühendatud erinevatele induktiivpooli kasutavatele elektriskeemidele, samuti elementidele, mida me varem oma kursusel õppisime - ja.
Induktiivpooli konstruktsioon ja tööpõhimõte.
Nagu elemendi nimest juba selgub, on induktiivpool esiteks lihtsalt mähis :) ehk siis suur hulk isoleeritud juhtme pöördeid. Veelgi enam, isolatsiooni olemasolu on kõige olulisem tingimus - mähise pöörded ei tohiks üksteisega lühistada. Kõige sagedamini keritakse pöörded silindrilisele või toroidaalsele raamile:

Kõige olulisem omadus induktiivpoolid on loomulikult induktiivsus, miks muidu panna selline nimi :) Induktiivsus on võime muuta elektrivälja energiat magnetvälja energiaks. See mähise omadus tuleneb asjaolust, et kui vool voolab läbi juhi, tekib selle ümber magnetväli:

Ja järgmine näeb välja magnetväli, mis ilmub, kui vool läbib mähist:

Üldiselt, rangelt võttes, on igal elektriahela elemendil induktiivsus, isegi tavalisel juhtmejupil. Kuid tõsiasi on see, et erinevalt mähiste induktiivsusest on sellise induktiivsuse suurus väga ebaoluline. Tegelikult kasutatakse selle väärtuse iseloomustamiseks Henry (H) mõõtühikut. 1 Henry on tegelikult väga suur väärtus, nii et kõige sagedamini kasutatakse µH (mikrohenry) ja mH (milhenry). Suurus induktiivsus pooli saab arvutada järgmise valemi abil:
Mõelgem välja, millist väärtust see avaldis sisaldab:
Valemist järeldub, et kui mähise keerdude arv või näiteks läbimõõt (ja vastavalt ka ristlõikepindala) suureneb, siis induktiivsus suureneb. Ja kui pikkus suureneb, see väheneb. Seega tuleks mähise pöörded asetada üksteisele võimalikult lähedale, kuna see viib mähise pikkuse vähenemiseni.
KOOS induktiivpooli seade Oleme selle välja mõelnud, on aeg mõelda füüsikalistele protsessidele, mis elektrivoolu läbimisel selles elemendis toimuvad. Selleks kaalume kahte ahelat - ühes juhime läbi mähise alalisvoolu ja teises vahelduvvoolu :)
Niisiis, kõigepealt selgitame välja, mis juhtub mähises endas, kui vool voolab. Kui vool ei muuda oma väärtust, siis mähis sellele mingit mõju ei avalda. Kas see tähendab, et alalisvoolu puhul ei tohiks kaaluda induktiivpoolide kasutamist? Aga ei :) Alalisvoolu saab ju sisse/välja lülitada ja just lülitushetkedel juhtubki kõik kõige huvitavam. Vaatame vooluringi:

Sel juhul toimib takisti koormusena, selle asemel võib olla näiteks lamp. Ahel sisaldab lisaks takistile ja induktiivsusele alalisvooluallikat ja lülitit, millega me vooluahela sulgeme ja avame.
Mis juhtub hetkel, kui lüliti sulgeme?
Pooli vool hakkab muutuma, kuna eelmisel ajahetkel oli see võrdne 0-ga. Voolu muutus põhjustab mähise sees oleva magnetvoo muutumise, mis omakorda põhjustab EMF (elektromootorjõu) tekkimist. eneseinduktsiooni, mida saab väljendada järgmiselt:
EMF-i esinemine põhjustab mähises indutseeritud voolu ilmumist, mis voolab toiteallika voolu suunale vastupidises suunas. Seega takistab iseindutseeritud emf voolu läbimist mähise kaudu (indutseeritud vool tühistab vooluringi, kuna nende suunad on vastupidised). See tähendab, et algsel ajahetkel (kohe pärast lüliti sulgemist) on mähist läbiv vool võrdne 0-ga. Sel ajahetkel on iseinduktsiooni EMF maksimaalne. Mis saab edasi? Kuna EMF-i suurus on otseselt võrdeline voolu muutumise kiirusega, nõrgeneb see järk-järgult ja vool vastavalt suureneb. Vaatame graafikuid, mis illustreerivad seda, mida oleme arutanud:

Esimesel graafikul näeme ahela sisendpinge– ahel on algselt avatud, kuid kui lüliti on suletud, kuvatakse konstantne väärtus. Teisel graafikul näeme voolu muutus läbi mähise induktiivsus. Vahetult pärast lüliti sulgemist puudub vool iseinduktsiooni EMF-i ilmnemise tõttu ja hakkab seejärel järk-järgult suurenema. Vastupidi, pooli pinge on algsel ajahetkel maksimaalne ja seejärel väheneb. Koormuse pingegraafik kattub kujult (kuid mitte suuruselt) pooli läbiva voolugraafikuga (kuna jadaühenduses on vooluahela erinevate elementide kaudu voolav vool sama). Seega, kui kasutame koormusena lampi, ei sütti need kohe peale lüliti sulgemist, vaid väikese hilinemisega (vastavalt kehtivale graafikule).
Sarnast mööduvat protsessi ahelas täheldatakse ka võtme avamisel. Induktiivpoolis tekib iseinduktiivne emf, kuid avatud vooluahela korral indutseeritud vool suunatakse vooluahela vooluga samas suunas, mitte vastupidises suunas, seega on induktiivpooli salvestatud energia kasutatakse vooluahela säilitamiseks:
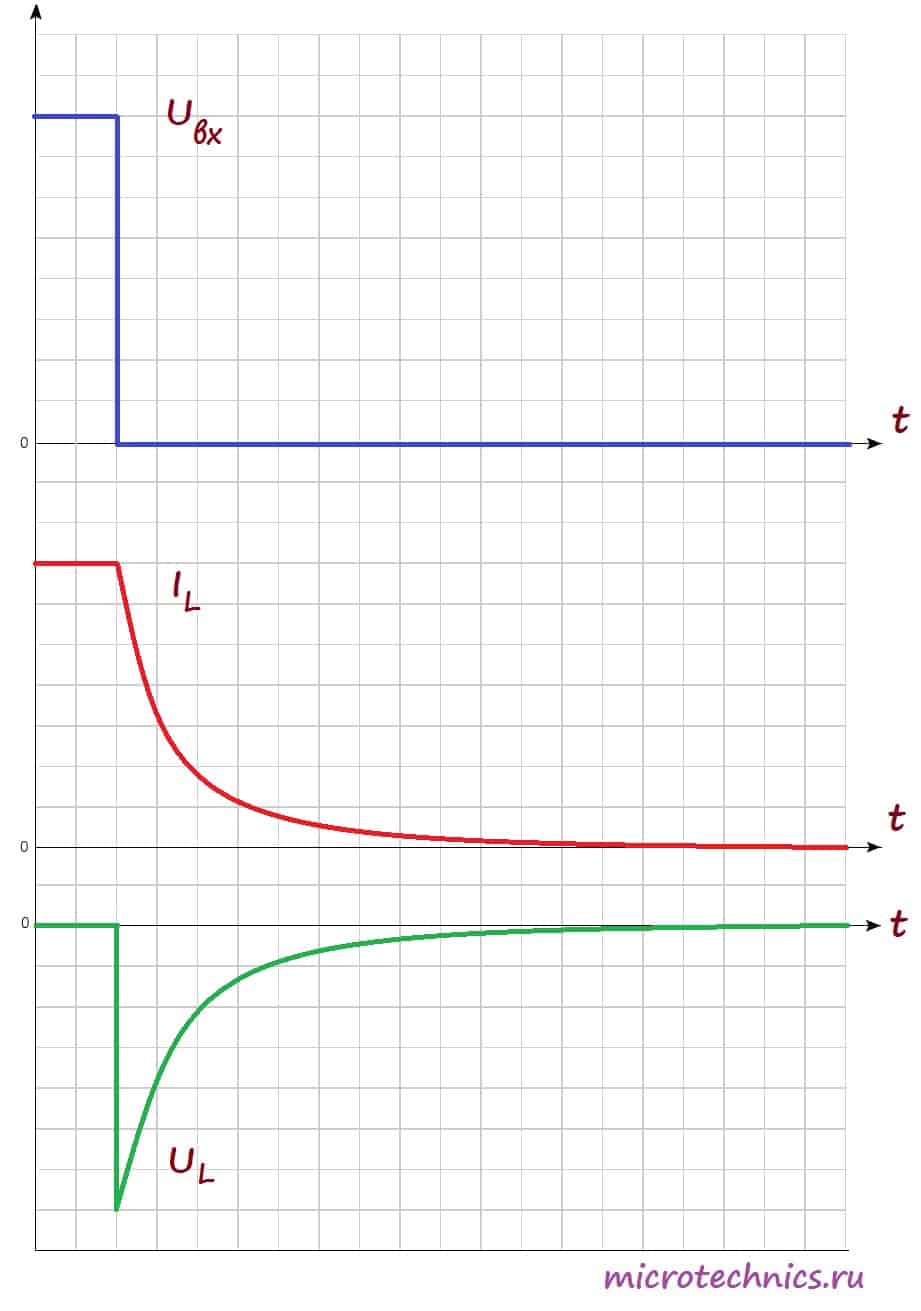
Pärast lüliti avamist tekib iseinduktsiooni emf, mis ei lase voolul läbi mähise väheneda, mistõttu vool ei jõua nullini kohe, vaid mõne aja pärast. Pinge mähises on kujult identne lüliti sulgemise korral, kuid märgilt vastupidine. See on tingitud asjaolust, et voolu muutus ja vastavalt ka iseinduktiivne emf esimesel ja teisel juhul on märgiga vastupidine (esimesel juhul vool suureneb ja teisel juhul väheneb).
Muide, mainisin, et iseinduktsiooni EMF-i suurus on otseselt võrdeline voolu muutumise kiirusega, seega pole proportsionaalsuskoefitsient midagi muud kui mähise induktiivsus:
See lõpeb alalisvooluahelate induktiivpoolidega ja liigub edasi Vahelduvvooluahelad.
Mõelge vooluringile, milles induktiivpoolile antakse vahelduvvool:

Vaatame voolu ja iseinduktsiooni EMF-i sõltuvusi õigeaegselt ja siis saame aru, miks need välja näevad:

Nagu me juba teada saime Enese esilekutsutud emf meil on voolu muutumise kiiruse otseselt proportsionaalne ja vastupidine märk:
Tegelikult näitab graafik meile seda sõltuvust :) Vaadake ise - punktide 1 ja 2 vahel muutub vool ja mida lähemale punktile 2, seda väiksemad on muutused ja punktis 2 lühikest aega vool ei muutu üldse selle tähenduses. Vastavalt sellele on voolu muutumise kiirus punktis 1 maksimaalne ja väheneb sujuvalt punktile 2 lähenedes ning punktis 2 on see võrdne 0-ga, mida näeme iseindutseeritud emf-graafik. Veelgi enam, kogu intervalli 1-2 jooksul suureneb vool, mis tähendab, et selle muutumise kiirus on positiivne ja seetõttu võtab kogu selle intervalli EMF vastupidi negatiivseid väärtusi.
Samamoodi punktide 2 ja 3 vahel - vool väheneb - voolu muutumise kiirus on negatiivne ja suureneb - iseinduktsiooni emf suureneb ja on positiivne. Ma ei kirjelda graafiku ülejäänud jaotisi - kõik protsessid seal toimuvad samal põhimõttel :)
Lisaks on graafikul märgata väga olulist punkti – voolu suurenemisega (jaotised 1-2 ja 3-4) on iseinduktsiooni EMF ja vool erinevad märgid (jaotis 1-2: , title="(!) KEEL: Renderdab QuickLaTeX.com" height="12" width="39" style="vertical-align: 0px;">, участок 3-4: title="Renderdas QuickLaTeX.com" height="12" width="41" style="vertical-align: 0px;">, ). Таким образом, ЭДС самоиндукции препятствует возрастанию тока (индукционные токи направлены “навстречу” току источника). А на участках 2-3 и 4-5 все наоборот – ток убывает, а ЭДС препятствует убыванию тока (поскольку индукционные токи будут направлены в ту же сторону, что и ток источника и будут частично компенсировать уменьшение тока). И в итоге мы приходим к очень интересному факту – катушка индуктивности оказывает сопротивление переменному току, протекающему по цепи. А значит она имеет сопротивление, которое называется индуктивным или реактивным и вычисляется следующим образом:!}
Kus on ringsagedus: . - See .
Seega, mida suurem on voolu sagedus, seda suurema takistuse induktiivpool sellele annab. Ja kui vool on konstantne (= 0), siis on pooli reaktants 0, vastavalt sellele ei mõjuta see voolavat voolu.
Läheme tagasi meie graafikute juurde, mille tegime vahelduvvooluahelas induktiivpooli kasutamise jaoks. Oleme määranud mähise iseinduktsiooni emf, kuid milline saab olema pinge? Kõik siin on tegelikult lihtne :) Vastavalt Kirchhoffi 2. seadusele:
Ja järelikult:
Joonistame vooluahela pinge ja voolu sõltuvuse ajast ühel graafikul:

Nagu näete, nihutatakse voolu ja pinget üksteise suhtes faasis () ja see on induktorit kasutavate vahelduvvooluahelate üks olulisemaid omadusi:
Kui induktiivpool on ühendatud vahelduvvooluahelaga, tekib pinge ja voolu ahelasse faasinihe, kusjuures vool on veerandi perioodi võrra pingest faasist väljas.
Nii mõtlesime välja, kuidas mähis vahelduvvooluahelaga ühendada :)
Siin me ilmselt lõpetame tänase artikli, see on juba üsna pikaks veninud, seega jätkame oma vestlust induktiivpoolide teemal järgmisel korral. Nii et peatse kohtumiseni, meil on hea meel teid meie veebisaidil näha!