Жермен кездесу: ұшақтар қалай қонады. Курс және сырғанау жолы жүйелері Сырғанау жолының көлбеу бұрышын кім анықтауы керек
Авторы: Дмитрий Проско Күні: 06.02.2005 23:20
Парк-плантация жүйесі (бұдан әрі біз оны Ресейде әдеттегідей KGS деп атаймыз) үлкен және бос емес аэродромдардағы ең көп таралған қону жүйесі болып табылады. Сонымен қатар, бұл ең дәл болып табылады, егер сіз MLS - микротолқынды қону жүйесін әлі есептемегенде, ол әлі бірдей кең таралуды алған жоқ. Енді біз бұл жүйенің қалай жұмыс істейтінін және оны қалай пайдалану керектігін анықтауға тырысамыз. Әрине, бұл мақала ең толық және жалғыз дұрыс нұсқаулық болып көрінбейді :), бірақ бастапқы кезеңде оқу құралы ретінде ол сізге көп көмектеседі.
КГС құрамы және жұмыс істеу принципі
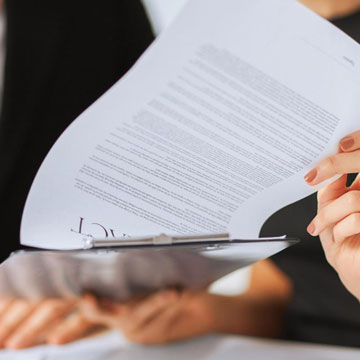
Біз қону кезінде аспаптарда көретініміз - жақындау жолына қатысты ұшақтың орнын көрсететін 2 қиылысатын жолақ. Олардың неліктен қозғалатынын және ұшақтың ұшу-навигациялық кешені неліктен ұшақтың орны туралы өте дәл ақпарат алатынын түсінуге тырысайық.
Сонымен, KGS неден тұрады:
- Көлденең жазықтықта ұшақты бағыттауды қамтамасыз ететін локализатор – курста.
- Тік жазықтықта – сырғанау жолының бойымен бағыттауды қамтамасыз ететін сырғанау жолының маякы.
- Қону траекториясының белгілі бір нүктелерінің өту сәтін көрсететін маркерлер. Әдетте маркерлер LPRM және BPRM-де орнатылады.
- Әуе кемесінің бортында сигналды қабылдау мен өңдеуді қамтамасыз ететін қабылдау құрылғылары.
ҰҚЖ жанында локализатор мен сырғанау жолының маяктары орнатылған. Локализатор - ортаңғы сызық бойымен ҰҚЖ-ның қарама-қарсы шетінде, ұшу-қону жолағының табалдырығынан ұшып шығу нүктесінен қашықтығында ұшу-қону жолағының бүйіріндегі сырғанау жолындағы маяк.
Енді бұл маяктар қалай жұмыс істейтіні туралы. Локализаторды негізге алып, оның жұмысын біршама жеңілдетілген түрде қарастырайық. Жұмыс кезінде маяк қонуға кіру траекториясы бойымен бағытталған 2 жапырақша түрінде схемалық түрде көрсетілуі мүмкін әртүрлі жиіліктегі 2 сигнал жасайды.

Егер жазықтық дәл осы екі жапырақшаның қиылысында болса, екі сигналдың да күші бірдей, сәйкесінше олардың қуаттарының айырмашылығы нөлге тең, ал аспаптың көрсеткіштері 0-ді береді. Біз жолда келеміз. Егер ұшақ солға немесе оңға ауытқыса, бір сигнал екіншісінен басым бола бастайды. Ал курс сызығынан неғұрлым алыс болса, бұл басымдық соғұрлым жоғары болады. Осының нәтижесінде сигнал күшінің айырмашылығына байланысты ұшақ қабылдағышы курс сызығынан қаншалықты алыс екенімізді дәл анықтайды.
Сырғанау жолындағы маяк дәл сол принцип бойынша, тек тік жазықтықта жұмыс істейді.
Құралдардың көрсеткіштерін оқу
Сонымен, біз ҚГС әрекет ету аймағына кірдік. TNG жолақтары масштабтан шығып кетті, сондықтан біз қай жерде екенімізді және жақындау траекториясына дәл сәйкес болу үшін ұшақты қалай басқаруымыз керектігін анықтайтын уақыт келді.
Қай құрылғыны орнатқанымызға байланысты көрсеткіш өзгеруі мүмкін, бірақ негізгі принцип өзгеріссіз қалады - жолақтар (көрсеткілер, индекстер) бізге позицияны көрсетеді. позициямызға қатысты жақындау траекториясы. Енді қарастыратын құрылғыда курсқа қатысты позициямыз тік жолақпен көрсетіледі, ал сырғу жолына қатысты орнымыз құрылғының оң жағындағы үшбұрышты көрсеткіш болып табылады.
Жолақтардың өзі бізге траекториямыздың қай жерде екенін дәл көрсетіп тұрғандай. Егер курс жолағы сол жақта болса, курс сызығы да сол жақта, яғни солға бұрылу керек. Сырғанау жолы үшін де солай - егер сырғанау жолының индексі төмен болса, онда біз жоғары көтерілеміз және сырғанау жолын «қуып жету» үшін тік жылдамдықты арттыру керек.
Енді ұшақтың әртүрлі позициялары арқылы өтіп, жалпы суретте көрсетілген позициялардағы құрылғының көрсеткішін қарастырайық.

1. Біз курс сызығында тұрмыз және сырғанау баурайының кіру нүктесіне әлі жеткен жоқпыз. Барлығы солай болуы керек - тақырып жолағы дәл ортасында, сырғанау жолының индексі жоғарғы жағында. Сырғанау жолының сызығы үстімізден өтіп, көкжиекке қатысты орташа есеппен 2 градус 40 минут бұрышта ешқайда ұмтылмайды. Айтпақшы, әр түрлі аэродромдарда сырғанау жолының көлбеу бұрышы (UNG) әртүрлі. Бұл жер бедері мен басқа да жағдайларға байланысты. Мысалы, таулы аэродромдарда UNG 4-5 градусқа дейін болуы мүмкін.

2. Біз Glide Path Entry Point (GWP) орнындамыз. Бұл сырғанау баурайының шеңбер биіктігімен қиылысуынан пайда болатын нүкте. Орташа TG қашықтығы шамамен 12 км. Әрине, шеңбердің биіктігі неғұрлым жоғары болса және LL кішірек болса, TVG ұшу-қону жолағының табалдырығынан алысырақ болады.
3. Біз сол жақта және жоғарыдамыз. Оңға бұрылып, түсу жылдамдығын арттыру керек.
4. Біз сол жақта және төмен. Тігінен алып, оңға қарай бұрайық.
5. Біз оң жақта және жоғарыдамыз. Солға бұрылып, вертикалды үлкейтейік.
6. Біз оң жақта және төмен. Не істеу керек екенін ойлаңыз :)
Жалпы, мен сізге айтқым келгені осы болды :)
Соңында мен өте маңызды қосымша қосқым келеді.
Ұшу-қону жолағына неғұрлым жақын болсақ, ұшақтың эволюциясы аз болуы керек, өйткені аспап өте сезімтал болады. Мысалы, егер біз ҰҚЖ табалдырығынан 10 км қашықтықта болсақ, шкаланың екінші нүктесіндегі бағыттаушы жолақ 400 метр немесе одан да көп бүйірлік ауытқуды білдіруі мүмкін (бұл мысал). Бұрылу үшін бағытты 4-5 градусқа немесе одан да көп өзгерту керек. Егер біз 2 км қашықтықта болсақ, онда штанганың бұл позициясы ауытқулардың максималды рұқсат етілгеннен асып кеткенін білдіреді, ал біз үшін екінші шеңберге өту ғана қалады. Әуе кемесі ҰҚЖ табалдырығына неғұрлым жақын болса, соғұрлым бағыт орталыққа жақын болуы керек. Ең дұрысы, әрине, дәл орталықта :) Және сәйкесінше, біз неғұрлым жақын болсақ, ұшақтың эволюциясы аз болуы керек. Жақын жетек аймағында 30 градус орамды төсеу мағынасы жоқ. Біріншіден, мұндай биіктікте қауіпті, екіншіден, ұшақтың инерциясын ескере отырып, оны айналдыруға уақыт болмайды.
Тәсіл- қонуға дейін тікелей әуе кемесі ұшуының соңғы кезеңдерінің бірі. Траектория бойынша ұшақты ұшыруды қамтамасыз етеді, ол түз қондықону нүктесіне апарады.
Қонуға қонуға кіру радионавигациялық жабдықты қолдану арқылы да (және бұл жағдайда аспаптық қонуға кіру деп аталады), сондай-ақ экипаж табиғи көкжиек сызығы, байқалатын ҰҚЖ және жердегі басқа белгілер бойынша бағдарланған көзбен де жүзеге асырылуы мүмкін. Соңғы жағдайда қонуға кіру IFR (құралмен ұшу ережелері) ұшуды жалғастыру болса, визуалды қонуға кіру (VZP) деп аталуы мүмкін немесе VFR (визуалды ұшу ережелері) ұшуды жалғастыру болса, VFR қонуы.
сырғанау жолы(фр. глиссад- «тайғақ») – қонуға дейін бірден төмен түсетін әуе кемесінің ұшу жолы. Глайд тракті бойынша ұшу нәтижесінде ұшақ ұшу-қону жолағындағы қону аймағына кіреді.
Парапланда негізгі сырғанау еңісі қонуға дейін тікелей жол болып табылады.
Сырғанау еңіс бұрышы – сырғанау жолының жазықтығы мен горизонталь жазықтық арасындағы бұрыш. Сырғанау еңіс бұрышы аэродромның ұшу-қону жолағының маңызды сипаттамаларының бірі болып табылады. Қазіргі заманғы азаматтық аэродромдар үшін ол әдетте 2-4,5 ° диапазонында болады. Сырғанау еңіс бұрышының шамасына аэродром аймағындағы кедергілердің болуы әсер етуі мүмкін.
Кеңес Одағында сырғу жолының әдеттегі бұрышы 2°40′ болды. халықаралық ұйым азаматтық авиация UNG 3° ұсынады.
Сондай-ақ сырғу жолын кейде ұшақты қону алдында түсіру процесі деп те атайды.
Әуе кемелерінің басқа түрлерімен салыстырғанда, әуе кемесі ең ұзақ ұшу кезеңіне және басқаруды ұйымдастыру жағынан ең қиынға ие. Ұшу ұшып көтерілу үшін ұшу-қону жолағы бойымен қозғала бастаған кезден басталады және өту биіктігінде аяқталады.
Ұшу ұшудың ең қиын және қауіпті кезеңдерінің бірі болып саналады: ұшып көтерілу кезінде максималды термиялық және механикалық жүктеме жағдайында жұмыс істейтін қозғалтқыштар істен шығуы мүмкін, әуе кемесі (ұшудың басқа фазаларына қатысты) максималды жанармаймен толтырылады және ұшу биіктігі әлі де төмен. Авиация тарихындағы ең үлкен апат ұшу кезінде болды.
Әуе кемелерінің әрбір түрі үшін арнайы ұшып көтерілу процедуралары ӘК ұшу нұсқаулығында сипатталған. Түзетулер шығыс тізбектері, арнайы шарттар (мысалы, шуды азайту ережелері) арқылы жасалуы мүмкін, дегенмен кейбір жалпы ережелер бар.
Жеделдету үшін қозғалтқыштар әдетте ұшуға орнатылады. Бұл төтенше жағдай режимі, ондағы ұшу ұзақтығы бірнеше минутпен шектеледі. Кейде (егер жолақ ұзындығы рұқсат етсе) ұшу кезінде номиналды режим қолайлы.
Әрбір көтерілу алдында штурман ұшуды қауіпсіз тоқтатуға болатын шешім жылдамдығын (V 1) есептейді және әуе кемесі ҰҚЖ ішінде тоқтайды. V 1 есептеу кезінде көптеген факторлар ескеріледі, мысалы: ҰҚЖ ұзындығы, оның жағдайы, қамту, теңіз деңгейінен биіктігі, ауа райы жағдайлары (жел, температура), ұшақтың тиелуі, тепе-теңдігі және т.б. Егер сәтсіздік V 1 -ден жоғары жылдамдықта орын алса, жалғыз шешім ұшып кетуді жалғастыру, содан кейін қонуға мүмкіндік береді. Азаматтық авиацияның әуе кемелерінің көптеген түрлері қозғалтқыштардың біреуі ұшып көтерілген кезде істен шыққан жағдайда да, басқаларының қуаты автомобильді қауіпсіз жылдамдыққа жеткізгеннен кейін, ұшуға болатын минимум биіктікке дейін көтерілетіндей етіп жасалған. сырғанау жолы және ұшақты қондыру.
Ұшу алдында ұшқыш көтеру күшін арттыру және сонымен бірге ұшақтың үдеуіне аз ғана кедергі жасау үшін клапандар мен итарқаларды есептелген күйге дейін созады. Содан кейін диспетчердің рұқсатын күткеннен кейін ұшқыш қозғалтқыштарға ұшу режимін орнатады және доңғалақ тежегіштерін босатады, ұшақ ұшып көтерілуді бастайды. Ұшу кезінде ұшқыштың негізгі міндеті - оның бүйірінен жылжуына жол бермей, автомобильді ось бойымен қатаң ұстау. Бұл әсіресе желді жағдайда өте маңызды. Белгілі бір жылдамдыққа дейін аэродинамикалық руль тиімсіз және қозғалыс негізгі шассилердің бірін тежеу арқылы жүреді. Руль жұмыс істейтін жылдамдыққа жеткеннен кейін басқару руль арқылы жүзеге асырылады. Ұшу жолындағы тұмсық шасси әдетте бұрылу үшін құлыпталады (ұшу кезінде ұшақ оның көмегімен айналады). Ұшу жылдамдығына жеткенде, ұшқыш шабуыл бұрышын арттыра отырып, штурвалды бірқалыпты қабылдайды. Ұшақтың мұрны көтеріледі («Көтеру»), содан кейін бүкіл ұшақ жерден көтеріледі.
Ұшып көтерілгеннен кейін бірден қарсылықты азайту үшін (кемінде 5 метр биіктікте) шасси алынып тасталады, ал (бар болса) шығару шамдары, содан кейін қанаттың механикаландыруы біртіндеп жойылады. Біртіндеп тазалау қанаттың көтерілуін баяу азайту қажеттілігіне байланысты. Механизацияны жылдам алып тастау арқылы ұшақ қауіпті түсіру жасай алады. Қыста, ұшақ салыстырмалы түрде жылы ауа қабаттарына ұшқанда, онда қозғалтқыштардың тиімділігі төмендейді, түсіру әсіресе терең болуы мүмкін. Шамамен осы сценарий бойынша Руслан апаты Иркутскіде болды. Шассиді тарту және қанатты механикаландыру тәртібі әуе кемелерінің әрбір түрі үшін RLE-де қатаң түрде реттеледі.
Өтпелі биіктікке жеткеннен кейін ұшқыш стандартты қысымды 760 мм сынап бағанасына дейін орнатады. Өнер. Әуежайлар әртүрлі биіктікте орналасқан, ал әуе көлігі бір жүйеде басқарылады, сондықтан ауысу биіктігінде ұшқыш биіктіктің анықтамалық жүйесінен ҰҚЖ деңгейінен (немесе теңіз деңгейінен) ұшу деңгейіне (шартты биіктік) ауысуы керек. . Сондай-ақ, ауысу биіктігінде қозғалтқыштар номиналды режимге орнатылады. Осыдан кейін ұшып көтерілу кезеңі аяқталды деп есептеледі және келесі ұшу кезеңі басталады: көтерілу.
Ұшақтың ұшып шығуының бірнеше түрі бар.
- Тежегіштермен ұшу. Қозғалтқыштар максималды тарту режиміне жеткізіледі, бұл кезде ұшақ тежегіште ұсталады; қозғалтқыштар белгіленген режимге жеткеннен кейін тежегіштер босатылып, жүгіру басталады.
- Ұшу жолағында қысқа аялдамамен ұшу. Экипаж қозғалтқыштар қажетті режимге жеткенше күтпейді, бірақ бірден ұшып шығуды бастайды (қозғалтқыштар белгілі бір жылдамдыққа дейін қажетті қуатқа жетуі керек). Бұл жағдайда ұшудың ұзақтығы артады.
- Тоқтамай ұшып кету айналмалы басталуы), «қозғалыста». Қозғалтқыштар такси жолынан ұшу-қону жолағына шығу процесінде қажетті режимге кіреді, ол аэродромдағы ұшулардың жоғары қарқындылығында қолданылады.
- Арнайы құралдарды қолдану арқылы ұшып шығу. Көбінесе бұл ұшу-қону жолағының шектеулі ұзындығы жағдайында әуе кемесі палубасынан ұшып көтерілу. Мұндай жағдайларда қысқа жүгіру трамплиндермен, лақтыру құрылғыларымен, қосымша қатты зымыран қозғалтқыштарымен, автоматты қону шассиінің дөңгелек ұстағыштарымен және т.б. арқылы өтеледі.
- Әуе кемесінің тік немесе қысқа ұшып көтерілуі. Мысалы, Як-38.
- Су бетінен ұшу.
Парапланда негізгі сырғанау еңісі қонуға дейін тікелей жол болып табылады.
Сырғу жолының бұрышы- сырғанау жолының жазықтығы мен горизонталь жазықтық арасындағы бұрыш. Сырғанау еңіс бұрышы аэродромның ұшу-қону жолағының маңызды сипаттамаларының бірі болып табылады. Қазіргі заманғы азаматтық аэродромдар үшін ол әдетте 2-4,5 ° диапазонында болады. Сырғанау еңіс бұрышының шамасына аэродром аймағындағы кедергілердің болуы әсер етуі мүмкін.
Кеңес Одағында сырғу жолының әдеттегі бұрышы 2°40′ болды. Халықаралық азаматтық авиация ұйымы сырғанау жолының 3° бұрышын ұсынады (1944 жылғы Чикаго конвенциясына 10-қосымша, 1-том, 3.1.5.1.2.1 ұсыныс).
да қараңыз
Дереккөздер
- Үлкен энциклопедиялық сөздік: [А - З] / Ш. ред. А.М.Прохоров.- 1-ші басылым. - М .: Ұлы орыс энциклопедиясы, 1991. - ISBN 5-85270-160-2; 2-бас., қайта қаралған. және қосымша- М .: Ұлы орыс энциклопедиясы; SPb. : Норинт, 1997. - С. 1408. - ISBN 5-7711-0004-8.
«Глиссад» мақаласына пікір жазыңыз
Сілтемелер
Глиссадты сипаттайтын үзінді
Денисов одан бетер қабағын түйді.— Сығым, — деді ол, бірнеше алтыны бар әмиянды лақтырып, — Гостов, сана, жаным, онда қанша қалды, ал әмиянды жастықтың астына қой, — деді де, сержанттың алдына шықты.
Ростов ақшаны алып, ескі және жаңа алтынның үйінділерін бір жаққа қойып, механикалық түрде санай бастады.
- БІРАҚ! Телянин! Zdog "ово! Мені бірден үрле" ау! Басқа бөлмеден Денисовтың дауысы естілді.
- Кімде? Быковта ма, егеуқұйрықтарда ма?... Мен білдім, – деді тағы бір жіңішке дауыс, содан кейін бөлмеге сол эскадрильяның шағын офицері лейтенант Телянин кіріп келді.
Ростов жастықтың астына әмиянды лақтырып жіберіп, оған созылған кішкентай, дымқыл қолын сілкіп тастады. Телянин бірдеңе үшін науқан алдында күзетшіден ауыстырылды. Ол полкте өзін өте жақсы ұстады; бірақ олар оны ұнатпады, әсіресе Ростов бұл офицерге деген негізсіз жиіркенішін жеңе де, жасыра да алмады.
– Ал, жас атты әскер, менің Грачик саған қалай қызмет етеді? - ол сұрады. (Грачик мінген жылқы болды, Телянин Ростовқа сатты.)
Лейтенант өзі сөйлескен адамның көзіне ешқашан қарамады; Оның көздері үнемі бір заттан екіншісіне ауысатын.
- Мен сенің бүгін айдағаныңды көрдім...
«Ештеңе емес, жақсы ат», - деп жауап берді Ростов, оның 700 рубльге сатып алған бұл жылқысы осы бағаның жартысына да тұрмайтынына қарамастан. «Мен сол жақта еңкейе бастадым ...» деп қосты ол. - Жарылған тұяқ! Ештеңе етпейді. Мен саған үйретемін, қай тойтарма қою керектігін көрсетемін.
Василий Ершов Ту-154 ұшағында ұшу тәжірибесі
Глипопатта.
Глипопатта.
Тәжірибелі ұшқыштар барлық қателіктер, барлық өрескел қонулар, барлық ұшып шығулар бір шешуші факторға - ұшу-қону жолағын нысанаға ұстай алмауға негізделгенін біледі.
Ұшқыштың директордың жебесін үнемі ортада ұстай алмауы, немқұрайлылық
көліктің курс бойымен қозғалуының тұрақтылығы, директорлық жүйені пайдалану кезінде курсты «таңдау» бойынша әр түрлі теориялар, соңғы кезеңде курсқа түсу – мұның бәрі адамның қарапайым шындықты дұрыс түсінбеуінің белгісі. Үнемі тітіркендіргіш ұсақ-түйекке алаңдап, негізгі тапсырманы шешу мүмкін емес: «кейбір» курс.
Велосипедті еңкейту жағын және рульдің ауытқуының бүйірі мен мөлшерін үнемі салыстыру арқылы жақсы жүру мүмкін емес. Сіз рефлекс алғанша.
Бұл ұшқыштың режиссер көрсеткісінде болуы керек рефлекс түрі. Көрсеткінің ортасында емес орналасуы ыңғайсыздықты тудыруы керек. Көрсеткіштің ауытқуына реакция автоматты түрде болуы керек. Сәйкестік сезімін дамыту керек. Кімде бар болса, ол әрқашан оське ұмтылады; ол әрқашан осьте отырады, ал осьтен түсу кәсіпқойдың өзін төмен сезінеді.
Егер ұшқыш курсты рефлексті түрде сақтау мәселесін шешсе, онда оның барлық назарын бойлық арна бойынша машинаның әрекетін талдауға аударуға болады. Мұндай ұшқыш бұл мәселені қатесіз шешеді.
Әуе кемесінің сырғанау жолы бойымен қозғалысының міндеті - ол үнемі кедергі күшіне тең болатындай тарту күшін таңдау, яғни жылдамдық тұрақты. Әуе кемесіне сыртқы күштер әсер еткенде, ұшқыш олардың әсер ету тиімділігін шама мен уақыт бойынша бағалауы керек және не бұл бұзылуларды күте алуы керек, не егер олар күштер тепе-теңдігін бұзу қаупі төнсе, ұшу параметрлерін өзгертуі керек. , алаңдататын күштер жойылған кезде бастапқы режимге оралу.
Іс жүзінде, біз білетініміздей, бұл қозғалтқыштардың қадамы мен күшінің үздіксіз өзгеруі. Ал қонуға дейінгі түзудегі командалардың жиілігіне қарап ұшқыштың кәсіби деңгейін бағалауға әбден болады.
Көбінесе ұшқыш сырғанау жолындағы режимді алдын ала есептей алмағандықтан, өзіне қиындықтар туғызады. Бейнелеп айтқанда, ол «ұшақтың артында ұшып», режимді өзгерту және питинг жасау арқылы тәртіпсіздіктерге жауап береді.
Ұшқышты басқарудың бұл стилі маған біздің ресейлік көшелермен жүретін тәжірибесіз жүргізушіні еске түсіреді. Мен люкті көрдім - мен айдадым, мен люкті көрдім - мен айдадым, мен люкті көрдім - мен айналдым ... Иә, басқа қатарда тұрыңыз немесе бір нәрсе. Жоқ, ол жауап беріп жатыр. Ұшақты мұндай басқару бұрынғысынша қозғалыс тұтынушылығы, «газ - тежегіш» принципі.
Сонымен, бізде тапсырма бар: аспаптық және тік жылдамдықтардың тұрақтылығы. Олардың есептелген мәндері белгілі: шамамен, тиісінше 270 және 4. «Неден билеу керек» деп сырғанау жолындағы көліктің мінез-құлқына талдауды қалай құруға болады?
Тік жылдамдықтан «Билеу». Егер ол тұрақты болса, онда кіру тұрақты. Егер тік аяғына дейін тұрақты болса, онда көзқарас идеалды, мәселе шешілді және ол тек қонуға қалады.
Егер тік жылдамдық орталықта сырғанау жолының көрсеткісін сақтай отырып, арта бастаса, онда артқы желдің құрамдас бөлігі пайда болды немесе керісінше құлады.
Егер мұндай құбылыс LBM-ден кейін орын алса, онда ол әдетте жерге жақын желдің әлсіреуімен байланысты. Егер ол биіктікте болса, онда өзгеріс күтілгенін есте ұстаған жөн, мүмкін желдің кесілуі.
Кез келген жағдайда тік жылдамдықтың артуы аударма жылдамдығының жоғарылауына әкеледі. Бірақ - тек сырғанау жолы центрде болған жағдайда ғана, яғни жазықтық гипотенузаның бойымен қозғалады және векторларды қосудың барлық заңдары әрекет етеді. Егер тік жылдамдықтың жоғарылауы сырғанау жолының астындағы сорумен байланысты болса, онда жетекші көрсеткі бірдей қадаммен және бірдей жылдамдықпен қарқынды көтеріледі.
Егер қате жіберілсе және қадам азайса, онда ұшақ тік және көрсетілген жылдамдықтардың жоғарылауымен сырғанау жолының астына түседі.
Ұшқыш тік жылдамдықтың өзгеру себебін үнемі талдап отырады. Немесе бұл оның техникалық қателері, дыбыстың жоғарылауы; не бұл желдің өзгеруі; немесе сол режимдегі итеру шамасына және бірдей трансляциялық жылдамдықтағы көтеру мөлшеріне әсер ететін температура мен ауа тығыздығының өзгеруі. Соңғы жағдайда тік көтерілу сырғу жолының инесін центрде ұстау үшін ұшқыштың қадам бұрышын азайтуының сөзсіз салдары болып табылады.
Немесе ұшқыш жоғарылатылған режимді сақтайды және жылдамдықты үдетеді, ал ұшақ сырғанау жолынан жоғары жүруге бейім, ал оны сырғанау жолында ұстау үшін тік жылдамдықты арттыру қажет.
Тік жылдамдықтың өзгеру себебін анықтай отырып, ұшқыш, егер бұл оның техникалық қателігінен болса, қамытты бұру арқылы ғана бастапқы ұшу режиміне оралуға болатынын немесе қозғалтқыштардың күшін өзгерту қажеттігін бағалауы керек. ұшу шарттары биіктікке қарай өзгерсе немесе бұзылу жойылғанша күтіңіз және жылдамдығы тұрақты машина бастапқы режиміне өздігінен оралғанша күтіңіз.
Осы жағдайлардың кез келгенінде лифтті мүмкіндігінше мұқият басқару қажет. Әдетте сезімтал ұшқыш тік жылдамдықты өзгерту тенденциясын байқайды және оны қадамда әрең байқалатын импульспен есептелген мәнге қайтаруға тырысады, рульді бірден бастапқы орнына қайтарады. Триммерді басыңыз - кері басыңыз. Шындығында, сырғанау жолындағы барлық пилоттар, автоматты түрде жүргізілетін курсқа қосымша, тік жылдамдықты сақтау арқылы дәл жүзеге асырылады. Директор сәл көтерілді - тік бірден төмендейді. Директор ортаға оралды - есептелген тік сызық дереу орнатылады. Егер директор қайта-қайта көтерілуге ұмтылса, бұл қазірдің өзінде тенденция: тік жылдамдықты азайту керек; себебі неде?
Бұл талдаудың барлығы санадан тыс деңгейде жүзеге асырылады және мида тек ұшақтың, дәлірек айтсақ, ұшқыштың өзі қалау сезімі арқылы көрінеді: «Мен жоғары көтерілдім. Мені сырғанау баурайының үстінен итеріп жіберді... саяхатшы жолдасым? Үлкен режим? Инверсия? Күшті қарсы екпін?
Себепті анықтауға байланысты мен жай ғана басып тұрамын, немесе режимді басып, алып тастаймын, немесе ұстап тұрып, шыдамдылықпен күтемін: бұл импульс құлайды, құлап кетеді; жылдамдық артсын, мен шыдамдымын, жылдамдық та төмендейді ...
Сіз, әрине, ойлай алмайсыз. Директорды орталықта ұстаңыз және жылдамдықтың өзгеруіне әрекет етіңіз: жоғарылады - режимді алып тастаңыз, құлады - қосыңыз.
Егер бұл тік жылдамдықты және әдетте оның секіруімен бірге жүретін қадам диапазонын есепке алмаса, онда курс пен сырғанау жолының формальды сақталуымен тұрақты көрсетілген жылдамдықпен жобадан тыс жоғары тік жылдамдық әлі де сақталады. төбенің алдында әбден мүмкін, оны түзету сырғанау жолын ұстауға түзету енгізеді, ал сырғанау жолын сақтау қатесін түзету қазірдің өзінде есептелмеген тік жылдамдыққа қосылуы мүмкін.
Ықтимал ауытқулардың тарылған сынасында - қозғалыстардың назары мен нәзіктігі енді жеткіліксіз; егер бұл әлі де назарды бағытты сақтауға аударса, өрескел қателік ықтималдығы артады.
Талдаудың барлық мәні - 80 тонналық ұшақтың жерге жақындаған кездегі тік жылдамдығын тұрақты ұстау. Оны өтеу үшін қарапайым қадамдарды орындау қажет. Бірақ егер жерге жақын тік жылдамдықты болжау мүмкін емес болса, онда дәл есептелген сәтті ұстап алу мүмкін емес, ал салыстырмалы түрде жұмсақ қону - кездейсоқ мәселе.
Бұл нәзіктіктер, әрине, қарапайым ұшу жағдайларына қолданылмайды
қарапайым ұшқыш да параметрлерге төтеп бере алады.
Біз кез келген, тіпті өте қиын жағдайларда ұшамыз, ол кезде капитаннан оның барлық ерік күші, оның барлық таланты, жағдайды басқару қабілеті - және, әсіресе, өткір уақыт жағдайында нәзік талдау қабілеті қажет. қысым. Капитан жағдайды талдауға үйренген сайын, оның шеберлігі, санадан тыс деңгейде машинаның әрекетін басқаруға мүмкіндік беретін түйсігі дамиды және кабинада тыныш, достық атмосфераны сақтауға көбірек көңіл бөледі, онда экипаж еркін және сенімді жұмыс істейді.
Біздің жұмысымыздың ерекшелігі мынада, біз қыста жиі аязды инверсиялар сирек кездесетін солтүстік аэродромдарда ұшуға тура келеді. Ауа температурасы жерге қарай күрт төмендей бастайтын қабат 200-150м биіктікте жатыр, және бұл температура шекарасында желдің ығысуы сирек емес, турбуленттілікпен және ХАС-да секірулермен бірге жүреді.
Мен полярлық фронт жағдайында, қатты желмен, -30 ° төмен температурада қонуға тура келді, және аязды инверсиямен санаспастан, мен жылы қабаттан суық қабатқа өту жағдайына келдім. 150 метр - инверсиямен бірге жүретін барлық қиындықтардың толық жиынтығымен. Біздің RLE желдің ығысу жағдайында 200 м-ден төмен сырғанау жолында қозғалтқыш режимін азайтуды шектейді. Менің тәжірибем мен аға әріптестерімнің тәжірибесіне сүйене отырып, мен «В» және «М» үшін сәйкесінше 72% және 75% шектеулер жылдамдықтың күрт жоғалуынан қорқу үшін енгізілген деген қорытындыға келдім. найзағайлы бұлтқа жақын ағындар. Бірақ біздің ұшақтың аязды инверсия жағдайында ұзақ уақыт сынақтан өткені екіталай, өйткені біз оны осы жағдайларда ұшамыз.
«М» машинасы үшін «75% кем емес» режиміндегі шектеу экипажды аязды қыста қиын жағдайларда қояды. Кейде жеңіл көлікте тыныш, тіпті сырғанау жолына кіре берісте қажетті режим қазірдің өзінде 78-76% құрайды. Жерге жақындаған кезде ауаның конденсацияланғаны сонша, 75% режимі тым көп күш тудырады және ұшақ жылдамдай бастайды. Жылдамдықты азайту шектеу бермейді; тік жылдамдықты арттыру тек жеделдетуді қосады. Шектеулі жолақтарда бұл ұшуға әкеледі, айналып өту жақсы.
Егер экипаждың мұндай жағдайларда қонуы өте маңызды болса, олар не маңыздырақ екенін білуі керек - фигура немесе машинаның нақты әрекеті. 75 саны жаздың аптап ыстығында желдің ығысуы үшін есептелген және өте нақты. Төмен температура жағдайында ол абсурдтық шекарада.
Мұндай жағдайларда ұшақ мінсіз және 75% -дан аз режимде, қажет болған жағдайда төмен газға дейін ұшады. Сондықтан теңдестірілген жақындау режимін теңгерімсіз қалдырмау үшін шарттар талап ететін режимді орнату қажет. Жалғыз нәрсе, бос режимге жақын режимдерде жылдамдық трендін мұқият бақылап, оның құлдырау үрдісі байқалса, теңестіру алдында режимді уақытында қосу керек.
Кез келген жағдайда, төмен температурада қону қозғалтқыш қуатын уақтылы азайтуды талап етеді, ал жерге неғұрлым жақын болса, соғұрлым жігерлі. Бұл жерде мәселе сондай-ақ қарсы жел әдетте жерге қарай азаяды, бұл жердегі жылдамдықтың жоғарылауын білдіреді және вертикальды біршама жоғарылату қажет. Жас ұшқыштардың VPR-дан кейінгі әдеттегі қатесі - дәл осы себепті сырғанау жолынан жоғары өту. Ал машинаны басу керек, яғни режимді азайту уақыты келді.
Трендтерді болжау керек. Егер ұшқыш, мысалы, сырғанау жолынан жоғары қарай ауытқуды түзетіп, режимді алып тастаса және көлікті жоғарыдан сырғанау жолына дейін басқан болса, онда сіз жойылған режим туралы есте сақтауыңыз керек және осы режимге жеткенге дейін алдын ала қосуыңыз керек. сырғу жолы, өйткені сырғу жолында тік жылдамдық машина қазір сырғанау жолын қуып жететін жылдамдықтан азырақ қажет болады.
Ауыр ұшақта бортинженер қажет болуы екіталай
автодроссель функцияларын орындау. Машинаның траекториядан ауытқуын көрсететін құралдарсыз бортинженер жылдамдықтың өзгеруіне жауап беруде әрқашан артта қалады.
Бұл өте жетілмеген автодроссельді пайдалануға да қатысты. Мен оны Шилак апатынан бері пайдаланбадым және оны басқаларға ұсынбаймын. Ол 1-2% шегінде режимді өзгерту арқылы жылдамдықтың өзгеруіне жауап бере алмайды, ол машинаның мінез-құлқын талдауға қатыспайды, керісінше, диссонансты енгізеді және ойлайтын ұшқышты шатастырады. Бірақ жолдағы люктерді айналып өтетін тұтынушылар үшін - өтінемін. «3» деген баға – ассистент.
Режимнің бөліктері туралы. RLE тым кең стандарттар береді. Мен әрқашан бір пайызды қолданамын. Әрине, күшті сөйлесуде (дәлірек айтсақ, «күшті сөйлесуде») сіз үлкен бөліктерді пайдалануыңыз керек, бірақ мен мүмкін болса, жылдамдықпен секірулер арасындағы негізгі трендке төтеп беруге және оны ұстауға тырысамын. бірдей бір пайыз.
Біз әрқашан режимнің 1% тонналық күш екенін есте ұстауымыз керек. Ұшудағы 70-тен 95%-ға дейінгі диапазон 500 кг-нан 10 тоннаға дейінгі салмақты қамтиды. Өзіңді сана. Егер мен мезгіл-мезгіл жағуға және сырғанау жолындағы 5 тонна итеруді дереу алып тастауға мүмкіндік берсем, мен ешқашан түзу сызықты біркелкі қозғалысқа қол жеткізе алмаймын.
Курсқа да солай. Жас ұшқыштың рульді қалай бұратынын, оның бизнесте болмаған ауытқуларды қалай түзететінін бүйірден бақылап отырып, мен оған басқарудан бас тартуды ұсынамын. Ол өздігінен ұшады ма? Өйткені, ол ағынмен болса, өздігінен ұшады. Айтпақшы, бұл жас және тәжірибелі ұшқыштар үшін де ережеге айналуы керек. Шығыңыз, көз жеткізіңіз: мен тым шектеулімін бе? Мен рульді ұстап тұрмын ба?
Бірақ жерге неғұрлым жақын болса, сына соғұрлым тар, дәлірек айтсақ, ауытқулар конусы, қозғалыстар соғұрлым дәл, кішірек, уақтылы болуы керек, реакция соғұрлым өткір болуы керек - және ұшақ соғұрлым тұрақты болуы керек.
Ауыр ұшақта OSB жүйесін қолданатын тәсіл дизайн параметрлерін қатаң сақтауды талап етеді, бұл бүкіл экипаждың жақсы үйлестірілген жұмысымен ғана мүмкін болады. Курс пен сырғанау жолын басқару жоқ, бірақ тек шамамен бағыт пен шамамен, маржа, тік жылдамдық бар. Жақсы, егер жою үшін басқару болса; қарапайым бағыт анықтау құралы пайдаланылса жақсы. Курсты «ZK» режимінде АБЖ көмегімен жүргізу оңайырақ. Бұл ретте, жетекті тәсілдің бір ерекшелігін әрқашан есте сақтау керек. Шығу бұрышы әрқашан көрінгеннің жартысы қабылдануы керек; шығу уақыты да қалағаныңыздан жарты есе көп алынады. Қате болма.
Бір кездері ИЛ-14 поршеньінде оқығандықтан, менде қазіргі кабина сияқты емес, кең бөлмеде үнемі артта болатын тыңдаушыларымның OSP сапарын бақылауға көп уақыт болды. Міне, мен ұшқыштың (мен де) курсқа тезірек және күрт жетуге деген құштарлығы бар екенін түсіндім. Мен бұл әрекеттерден не шығатынын көрдім. Ұшақ қону курсына енді және позиция сызығынан тыс шығу бұрышымен жүруді жалғастыруда, бірақ ARC әлі де кешігіп жатыр және сіздің басқа жағында екеніңізді сенімді түрде көрсете алмайды. Ал ол көрсеткенде, басқа бағытта шығу бұрышын алу керек; және нәтижесінде жазба синусоид бойымен алынады, ал DPRM әрқашан шетте қалады.
Алыс дискке неғұрлым жақын болса, соғұрлым кішірек шығу бұрыштарын алу керек және осы бұрыштармен жүруге аз уақыт қажет. Алысқа жақындай отырып, DPRM-дан дәл өтуге тырыспай, барлық назарды жақынға аударып, алдын ала курстан өту керек. VPR жеткен кезде, бұл алыс пен жақынның арасында, бағыт қонуға жақын болуы керек, ал KUR, әрине, дрейфті ескере отырып, 0o-ға жақын болуы керек.
Бойлық арнаны басқаруға келетін болсақ, мұндағы ерекшелік, жақындау әдісінің өзі вертикальды жылдамдықты есептелгеннен жоғары ұстауды талап етеді, яғни режимді аз ұстау керек.
DPRM өткеннен кейін тік жылдамдықты есептелген деңгейде ұстау керек,
бұл режимді алдын ала қосуды білдіреді.
OSB бойымен жақындаған кезде жиі кездесетін қателік - сырғанау жолы бойынша түсудің кеш басталуы және есептелген, яғни 0,5-1 м/с артық тік жылдамдықты сақтамау, бұл ұзақ қашықтыққа ұшуға байланысты. өту биіктікжәне оны сақтау керек аймақта тік ұлғаю қазірдің өзінде қатаң есептелген. Сырғанау көлбеуінің бұлай ығысуы ең соңына дейін жалғасуы мүмкін, бұл режим есептелгеннен төмендейді және тік жылдамдықтың маңызды екенін ұмытып кету қаупі бар және жоғарырақ нивелирлеуді бастау қажет болады. режимді белсенді түрде қосу. Кім бұл туралы өзінің соңына және осіне қатаң түрде жетуге құмарлығын ұмытса, ол қону кезінде лайықты шамадан тыс жүктеме алу қаупі бар.
150 метр биіктікке дейін барлық параметрлер: бағыт, сырғанау жолы, жылдамдық және вертикаль қалыпты және тұрақты болуы керек. Күшті атмосфералық бұзылулар ұшақты сырғанау жолынан лақтырып жібереді. Төмен көтерілу жоғары сияқты қорқынышты емес және сырғу жолына жақындаған кезде параметрлерді қалпына келтірумен режимді күшті қосуды және тік жылдамдықты төмендетуді қажет етеді. Егер ол көтерілсе, онда босқа кететін уақыт жоқ. Тәжірибелі ұшқыш мұрынды біркелкі, бірақ жігерлі түрде түсіре отырып, режимді бір уақытта тазарта отырып, бір қозғалыста сырғанау жолын қуып жетіп, тік жылдамдықты бір рет 7 м / с дейін арттыра алады, бірақ алдын ала, тіпті сырғанаға жақындағанға дейін. жол, ол режимді есептелгенге және алдын ала сырғу жолына қосады, вертикалды есептелген мәнге дейін төмендетеді. Параметрлерді тұрақтандыру үшін бұл операцияны 150 метр биіктікке дейін аяқтаған жөн.
Тәжірибесіз ұшқыш уақытты өткізіп алады да, баяу қарқынмен және режимді аздап тазарту арқылы сырғанау жолын қуып жетуге кіріседі, жылдамдықты арттырады, ал егер ол сырғанау жолын қуып жетсе, онда жоғары жылдамдықпен проблемалар туындайды. VFR-дегі тік және алға жылдамдықтар.
Мен бір реттік сырғанау жолын қуып жетудің бұл әдісін сипаттаймын, тек ұшақ алға жылдамдықты жылдамдатуға уақыт болмай-ақ биіктікті өз еркімен жоғалтатынын көрсету үшін, бірақ одан кейін түсуді азайту үшін айтарлықтай күш-жігер қажет, бұл мәнді, белсенді әрекеттерді білдіреді. капитан. Ал егер бұл әдіс белгілі бір шектерде DPRM аймағында қолданылуы мүмкін болса, онда ол төменде егжей-тегжейлі талқыланатын VPR-дан төмен мүлдем мүмкін емес.
Жақындау жүйесін таңдауға қарамастан, штурман төртінші айналымның басынан бастап және БРМ ұшуына дейін жетектер арқылы бағытты үнемі бақылауға міндетті. Локализатордың немесе ұшақтың курстық жабдығының істен шығуы және OSB басқаруы сақталды.
Сондай-ақ штурманға қашықтықтың биіктігін бақылау міндетті болып табылады. Тік бұрышты үшбұрышты сақтау керек. «Ары қарай жоқ!» пәрмені бойынша капитан сырғанау жолындағы жобалық режимнен 4-5 пайызға жоғары режимді орнату арқылы автомобильді дереу тегіс ұшуға шығаруға міндетті.
Жолаушыларда сырғанау жолындағы борттық жүйелердің жұмысына әсер ететін көптеген радиожабдықтардың пайда болуына байланысты әуе кемесі ескерту дабылын тудырмай-ақ белгіленген траекториядан бірқалыпты ауытқуы мүмкін. Бұл жолдардың авторы сыртқы жұмыс істейтін жүйелермен тік жылдамдықтың қалай біркелкі өсе бастағанын және режиссерлік көрсеткілердің ортасында тұрғанын көруге мүмкіндік алды. Тек штурманның «бұдан әрі жоқ» деген ескертуі және визуалды ұшуға шығу жағдайдың одан әрі дамуына кедергі болды.
Ту-154 пайдалану тәжірибесі көрсеткендей, экипаждар сырғу жолында (әсіресе төмен қону салмақтарында) ұсынылған ұшу жылдамдығын 10-15 км/сағ жоғары ұстауды үйренді. Әрине, жоғары жылдамдықпен ұшу қандай да бір түрде тыныш, кепілдендірілген, бірақ қону параметрлері дәл осы жылдамдыққа - бөксені кесіп өту жылдамдығына байланысты есептелетінін ұмытпау керек. Сондықтан, ұшу нұсқаулығында ұсынылған жылдамдықпен, яғни нақты қону салмағына дәл сәйкес келетін жылдамдықпен кесіп өткен жөн. Сырғанау жолында жылдамдықты сәл жоғарырақ болсын, бұл ықтимал соқтығысу кезінде бақылауға кепілдік береді, бірақ VPR-дан кейін жылдамдықты бірте-бірте азайту керек, ал басқа жағдайларда - және өте қарқынды. Жас ұшқыштардың жиі кездесетін қателіктерінің бірі – олар жылдамдықты көтергеннен кейін, олар төмен биіктікте желдің әлсіреуін және тік жылдамдықты аздап болса да арттыру қажет екенін ұмытып, оны ең түзу болғанша сақтайды. жылдамдығы, сондықтан режимді азайтуды талап етеді.
Жылдамдықты жоғары ұстаудың жалғыз уақыты - қатты мұздану жағдайында және қатты желмен қону кезінде. Бірақ Ту-154 ұшағында 20 жыл ұшқан кезде мен ешқашан қатты мұздауға ұшыраған емеспін және кейде мен түсуге тура келетін мұз қату қонуға қалай әсер еткенін көрмедім. Дегенмен, поршеньді ұшақтарға қонуға мәжбүр болған ескі ұшқыштардың тәжірибесі, сырғу жолындағы режимді номиналды және одан да жоғары деңгейге қосу - қатты мұздану болды - егер сізге шынымен қажет болса, Құдай сақтасын, мұндайға кіріңіз. Ту-154-тегі жағдайлар, мысалы, күту аймағында, сіз оларға байыпты қарауыңыз керек. Бұл жерде мұндай мұз аэродинамиканың бұзылуынан басқа, массаны айтарлықтай арттырады, сондықтан жылдамдықтың жоғарылауымен және кинетикалық энергиямен бірге жүгіруде тек кері әрекетті толық қолдану арқылы өшірілуі мүмкін екенін есте ұстаған жөн. Тоқта.
Көлденең желмен қонуға келетін болсақ, төменде оған назар аударылады.
Термиялық турбуленттілік кезінде сырғанау жолының жылдамдығын сақтау тек шыдамдылықты қажет етеді. Әдетте мұндай жағдайлар жеңіл желдерде болады, ал сырғу жолындағы машинаның әрекетін талдау оңайырақ. Кейде ұсынылған жылдамдықтан ауытқулар айтарлықтай болады, бірақ олар қысқа мерзімді және ұшқыш баяулағанда режимді өзгертуді қажет етпейді. Мұнда ұсынылған тік жылдамдық пен сырғанау жолын сақтау әлдеқайда қиын.
Күшті турбуленттілікке автоматты режимде, «турбуленттілікте» ауыстырып-қосқышы қосулы тұрғанда, автопилот өшірілген кезде IN-3 жолағын элерон тримінің қосқышымен бейтарап күйге қоюды ұмытпаған дұрыс. , ұшақты айналдыруға ниет жоқ. Тұрақтылықпен жұмыс істейтін жүйе бұдырлықпен жақсы күреседі, ал ұшқыш соңғы 20 секундта күшті үнемдейді.
Тұтастай алғанда, штурвалды басқару режимінде ұшу деңгейінен түсу, қолмен кіру және қону өте қиын, ал кейде олар соншалықты көп күш алады, ұшу уақытында ешқайсысы қалмайды. Өз басым мен ешқашан қолмен түспеймін, оның үстіне жас қосалқы ұшқыштарды ешқашан мәжбүрлемеймін. Сонымен бірге олар ойластырылған талдаудың орнына темірмен күресумен айналысады. Бір рет пайдалы болатынын дәлелдейтіндерге мен жауап беремін: бұл сізге қанша рет көмектесті? Маған, ешқашан. Ал бұл жаттығуларды жеңіл авиацияға қалдыру керек. Компьютермен тырнақ қағудың қажеті жоқ. Темір ұшқыштың қолына жұмыс істеуі керек, ал ми үтікті басқаруы керек. Үлкен органды ойнау үшін сильфоны бар құбырларға ауа сорудың қажеті жоқ.
Мен бұл жерде ауыр әуе лайнерінде ұшудың жоғары өнері туралы айтып отырмын. Біз авиацияның элитасымыз. Біз шеберміз. Ал бұл өнерге жұмысшы-шаруа көзқарасы орынсыз.
Осылайша, сырғу жолында қалыпты ұшқыш жетекші көрсеткілерді шеңбер ішінде ұстап тұруы және сырғу жолының бір нүктеден артық ауытқуына жол бермей, бастапқы режимге дереу оралу немесе оған қайта оралудың тұрақты тенденциясы. Бұл жағдайда тік жылдамдық талдаудың негізгі параметрі болып табылады, ал аспаптық - вертикалды өзгерту тенденциясының көрсеткіші. Құралдар қадам және қозғалтқыш режимі болып табылады.
Мүмкін менің әріптестерімнің бірі күледі: жақсы, үйінді ... иә, бәрі осы
бұл әлдеқайда оңай, қолдар өздері жасайды ...
Егер сізде осындай талант болса - иә денсаулық, ал зейнеткерлікке дейін қолдарыңыздың шеберлігін сақтаудан Құдай сақтасын. Мен мұны істей алмаймын. Менде мұндай реакция да, мұндай қабілет те жоқ, сондықтан бірден бір қозғалыспен - және патшаларда. Тек фильмдерде бәрі бірінші рет орындалады. Менің артымда өзіме үлкен, мұқият жұмыс, көптеген сәтсіздіктер және үнемі қанағаттанбау сезімі бар. Және әрбір ескі ұшқыш осындай.
Ескі капитанның ептілігі мен қырағылығымен ренжітетін мысалдар бар. Мысал
Иваново апаты басқа ыстық нүктелерді үнемі салқындату керек.
:: Ағымдағы]
ILS қонуы
Тасымалдаушы сырғанау жүйесі (ILS)
Жақсы көрінетін жерде көрнекі түрде қону оңай және жағымды, бірақ, өкінішке орай, ауа-райы бұған әрқашан мүмкіндік бермейді. Авиаторлар мәселенің шешімін іздей бастады.
Қазірдің өзінде 1929 жылы радионавигациялық жүйені сынау басталды, бұл ұшу-қону жолағынан көрінбейтін құралдармен қонуға мүмкіндік береді, ал 1941 жылы мұндай жүйені американдық авиация әкімшілігі елдегі алты аэродромда пайдалануға рұқсат берді.
Алғашқы аспаптың қонуы жолаушылар лайнерітұрақты рейс 1938 жылы 26 қаңтарда орындалды. Вашингтоннан Питтсбургке ұшқан Boeing 747 ұшағы тек курстық сырғанау жүйесі арқылы боранға қонды.
Ұшу-қону жолағы жүйесі (KGS) ҰҚЖ көрінбейтін жағдайда қонуға арналған. Ағылшын тілінде бұл жүйе ILS ретінде қысқартылған Instrument Landing System деп аталады. ILS екі негізгі тәуелсіз бөліктен тұрады: курс (локализатор) және сырғанау (глислоп) маяктары.

Локализатор, аты айтып тұрғандай, ұшақтың курстағы орнын басқаруға мүмкіндік береді. Локализатор жолақтың қарама-қарсы жағында орналасқан және әртүрлі жиілікте модуляцияланған сигналды тарататын, жолақ бойымен сәл әртүрлі бұрыштарға бағытталған екі бағытталған таратқыштан тұрады. Жолақтың ортасында екі сигналдың қарқындылығы максималды, ал жолақтың сол және оң жағында таратқыштардың біреуінің қарқындылығы жоғары. Қабылдаушы жабдық екі сигналды салыстырады және олардың қарқындылығына қарай ұшақтың орталық сызығының сол немесе оң жағында қанша орналасқанын есептейді.

Локализатор Америкада LOC немесе Еуропада LLZ ретінде қысқартылған. Тасымалдаушы жиілігі әдетте 108,000 МГц пен 111,975 МГц арасында болады. Қазіргі заманғы локализаторлар әдетте жоғары бағытталған. Ескі маяктар болмады және олардың сигналдарын қайтару бағытында алуға болады. Бұл өз ILS жабдықталмаған болса, ұшу-қону жолағының қарама-қарсы жағына дәл емес жақындауға мүмкіндік берді. Мұндай тәсілдің үлкен кемшілігі - құрылғы қарама-қарсы бағытта курстан ауытқуды көрсетеді, бұл тәсілді айтарлықтай қиындатады.
Сырғанау жолы (глисслоп немесе GP деп қысқартылған) ұқсас жолмен жұмыс істейді. Ол қону аймағындағы жолақтың бүйіріне орнатылады:

Сырғанау жолының тасымалдаушы жиілігі әдетте 329,15 және 335 МГц арасында болады. Бақытымызға орай, ұшқышқа сырғанау жолындағы маяк жиілігін бөлек енгізудің қажеті жоқ, құрылғы оны автоматты түрде реттейді.
Сырғанау жолының бұрышы (GPA) айналадағы рельефке байланысты өзгеруі мүмкін. Шетелде стандартты сырғанау еңіс бұрышы үш градусты құрайды. Ресейде 2 градус 40 минуттық бұрыш стандартты болып саналады.
Негізгі құрамдастардан басқа, ILS бірқатар қосымшаларды қамтуы мүмкін. Бұл компоненттер маркер шамдары болып табылады. Олар 75 МГц жиілікте тар бағытталған жоғары сигналды тарататын радиомаяктар. Ұшақ осындай радиомаяктың үстінен өткен кезде жабдық оны қабылдап, сәйкес индикаторды жанады. Ұшқыш индикаторға қарап, маякқа сәйкес шешім қабылдауы керек.

Маркер шамдарының үш түрі бар:
1. Алыс маркер маяк (Outer Marker, OM). Әдетте табалдырықтан 7,2 км қашықтықта орналасқан, бірақ бұл қашықтық әртүрлі болуы мүмкін. Маяктың үстінен өткен кезде кабинадағы О әрпі жанады және жыпылықтайды.Осы сәтте ұшқыш ILS көмегімен жақындау туралы шешім қабылдауы керек.
2. Ортаңғы маркер маяк (Middle Marker, MM). ҰҚЖ табалдырығынан бір шақырымдай жерде орналасқан, кабинада ол М әрпі бар индикатормен белгіленеді. ILS санаты бойынша жақындаған кезде, егер сол сәтте жерде көрінбейтін болса, ұшқыш ұшуды бастауы керек. - айнала.
3. Ішкі маркер маяк (Inner Marker, IM). Әдетте ұшу-қону жолағының табалдырығынан 30 метрдей қашықтықта орналасқан, I бук өту кезінде жанады.ІЛС II категориясы бойынша қонуға бет алған кезде, маяктың өту сәтінде жердің көрінуі болмаса, дереу іске қосу керек. айналып өту.
Іс жүзінде барлық маркер маяктарды бір уақытта орнату мүмкін емес. Ішкі маяк өте жиі жоқ. Көбінесе маркер маяктары жетекші радиостанциялармен біріктіріледі.
ILS-пен бірге жан-жақты диапазонды анықтайтын радиомаяк немесе RMD (ағылшын тілінде DME, Distance Measuring Equipment) жұмыс істей алады. Егер DME орнатылған болса, кабинадағы DME ұшу-қону жолағының соңына дейінгі қашықтықты көрсетеді. Кейде маркерлік маяктардың орнына DME қолданылуы мүмкін. Мұндай жағдайларда қону карталарында DME пайдалану ILS қонуы үшін міндетті болып табылады деп көрсетілуі мүмкін.
ILS оларды қолдануға болатын ең аз ауа райын анықтайтын санаттарға бөлінеді. Рим цифрларымен белгіленген ILS үш санаты бар. Үшінші санат, өз кезегінде, латын әріптерімен белгіленген үш кіші түрге бөлінеді. Төмендегі кестеде барлық ILS санаттарының мүмкіндіктері берілген:
ILS санаттары ILS жабдығына ғана емес, сонымен қатар әуе кемелерінің жабдықтарына да талаптар қояды. Мысалы, ұшақта I санатты пайдаланған кезде кәдімгі барометрлік биіктік өлшегішінің болуы жеткілікті, ал жоғары санаттарды пайдаланған кезде радиобиіктік өлшегіш міндетті болады.
Арнайы жабдық ILS дұрыс жұмыс істеуін бақылайды. Ақаулық туындаған жағдайда ILS автоматты түрде өшуі керек. ILS санаты неғұрлым жоғары болса, ILS ақаулықтарын жоюға және өшіруге соғұрлым аз уақыт кетеді. Сонымен, егер I санаттағы ILS 10 секунд ішінде өшуі керек болса, онда III санат үшін өшіру уақыты екі секундтан аз.
ILS-ке қонғалы тұрған ұшқыш алдымен қону үлгісімен танысуы керек. Әдеттегі ILS қону үлгісі келесідей:

Схемалар бөлек мақалада егжей-тегжейлі түсіндіріледі, бірақ әзірге бізді тек ILS жиілігі қызықтырады:

Бұл диаграмма ILS жиілігі 110,70 екенін көрсетеді, сонымен қатар DME жиілігін, маркерлердің орналасуын және қабылданбаған жақындау үлгісін көрсетеді.
ILS-пен жұмыс істеу үшін VOR-мен жұмыс істейтін бірдей жабдық жинағы пайдаланылады. Құралдар тақтасында қабылдағыштар әдетте NAV 1 және NAV 2 деп белгіленеді, егер екінші жинақ орнатылған болса. Ресиверге жиілікті енгізу үшін қос тұтқаны пайдаланыңыз. Оның көп бөлігі бүтін сандарды, жиіліктің кішірек бөлшек бөліктерін енгізу үшін қолданылады. Төмендегі суретте әдеттегі радионавигациялық құралдың басқару тақтасы көрсетілген:

Қабылдағыштар қызыл түспен белгіленген. Бұл бір ғана жиілікті енгізуге мүмкіндік беретін қабылдағыштың ең қарапайым түрі. Неғұрлым күрделі жүйелер бірден екі жиілікті енгізуге және олардың арасында жылдам ауысуға мүмкіндік береді. Бір жиілік белсенді емес (STAND BY), ол жиілікті таңдау тетігі арқылы өзгертіледі. Екінші жиілік белсенді (ACTIVE) деп аталады, бұл қазіргі уақытта қабылдағыш реттелетін жиілік.

Жоғарыдағы суретте екі жиілік сілтемесі бар қабылдағыштың мысалы көрсетілген. Оны пайдалану өте оңай: қажетті жиілікті енгізу үшін теруді пайдаланыңыз, содан кейін коммутатор арқылы оны белсенді етіңіз. Тінтуірді таңдау дөңгелегі үстіне апарған кезде тінтуір курсоры пішінін өзгертеді. Егер ол кішкентай көрсеткіге ұқсайтын болса, онда тінтуірді басқан кезде ондық өзгереді. Көрсеткі үлкен болса, онда санның бүтін бөлігі өзгереді.
Сондай-ақ кабинада ұшақтың қазіргі уақытта курстан және сырғанау жолынан қаншалықты алыс екенін көрсететін құрылғы болуы керек. Бұл құрылғы әдетте NAV 1 немесе VOR 1 деп аталады. Біз бұрыннан белгілі болғандай, ұшақта осындай екінші құрылғы болуы мүмкін. Cessna 172 ұшағында олардың екеуі бар:

Құрылғы компас шкаласына ұқсайтын жылжымалы шкаладан, дөңгелек OBS орнату нүктесінің тұтқасынан (ILS-мен жұмыс істеу үшін пайдаланылмайды), TOFROM бағыт көрсеткішінің көрсеткісінен, GS баннерінен және тік және көлденең екі жолақтан тұрады. Тік жолақ курстан ауытқуды, сырғанау жолынан көлденең ауытқуды көрсетеді. GS баннері сырғу еңіс сигналын алғаннан кейін жоғалады.
NAV 1 қабылдағышына ILS жиілігін енгізіп, құрылғыны бақылаңыз. Ұшақ дәл сырғу жолында және курста тұр делік:

Суреттен көріп отырғаныңыздай, бұл жағдайда NAV1 жолақтары дәл ортасында орналасқан. Бұл әрқашан ұмтылу керек идеалды ұстаным. Іс жүзінде кез келген бағытта ауытқу өте оңай. Егер ұшақ сырғанау жолынан төмен ауытқыса, тік жолақ жоғары қарай ауытқиды:

Бұл жағдайда руль дөңгелегін өзіңізге қарай тартып (немесе қозғалтқыш жылдамдығын арттыру) және сырғанау еңісіне оралуыңыз керек. Енді біздің ұшағымыз дәл сырғу жолында, бірақ курстан солға ауытқып кетті делік:

Бұл жолы жолақ оңға ауытқып кетті, яғни оңға бұрылып, бағытпен жүру керек. ILS бойынша ұшу кезіндегі ереже VOR бойынша ұшу кезіндегідей: жолақ көрсеткен бағытта ұшу керек. Жолақ қай жерде ауытқып кетсе, ұшақ сол жерге бағытталуы керек. Әдетте, екі жолақ бір уақытта ауытқиды:

Мұнда ұшақ сырғанау жолымен жоғары және курс бойынша оңға қарай ауытқып кетті. Ұшқыш сырғу жолына жету үшін төмен түсіп, курсқа оралу үшін оңға бұрылуы керек.
Лифт төсемімен жабдықталған ұшақтарда ұшақтың өзі сырғанау жолында қалатындай етіп кесу оңай. Алғашында бұл оңай болмайды, бірақ тәжірибенің пайда болуымен бәрі орындала бастайды. Ұшақ түсу үшін дұрыс кесілгеннен кейін, оны сәл түзетіп, бағыт жолағын ұстану ғана қалады.
Тік айналу жылдамдығын түзету үшін қозғалтқышты басқару тұтқасын пайдалануға болады: қозғалтқыш жылдамдығының жоғарылауы түсуді баяулатады, азаюы, керісінше, түсу жылдамдығын арттырады.
Ауа-райының қиын жағдайында жасанды көкжиектің көмегімен ұшақтың ғарыштағы жағдайын бақылауды ұмытпау керек және әрқашан жылдамдықты бақылап отыру керек. Қонуға қажетті жылдамдық әуе кемесінің ұшу нұсқаулығында жазылған.
Енді ILS-ті сәтті қолдану үшін оны іс жүзінде меңгеруге кірісу ғана қалды. Сіз http://www.luizmonteiro.com/Learning_VOR_Sim.htm мекенжайында орналасқан VOR/ILS тренажерінен бастай аласыз. Егер сіз оны LOC Glide Slope (ILS) режиміне ауыстырсаңыз, ол ILS жұмысын модельдеуді бастайды. Ұшақты тінтуірдің көмегімен көлденең және тік жазықтықта жылжыту арқылы сіз бағыттың мінез-құлқына үйреніп, еңіс жолақтарын сырғанай аласыз.
©2007-2014, Виртуалды авиакомпания X әуе жолдары
| [ :: Ағымдағы] | |